Inertial Navigation Systems (INS) for Marine Applications
Marine inertial navigation systems (INS) determine the position, velocity, and orientation of vessels and underwater vehicles when GNSS signals are unavailable or unreliable. They enable precise navigation in challenging marine environments.
If you design, build or supply Inertial Navigation Systems (INS), create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.
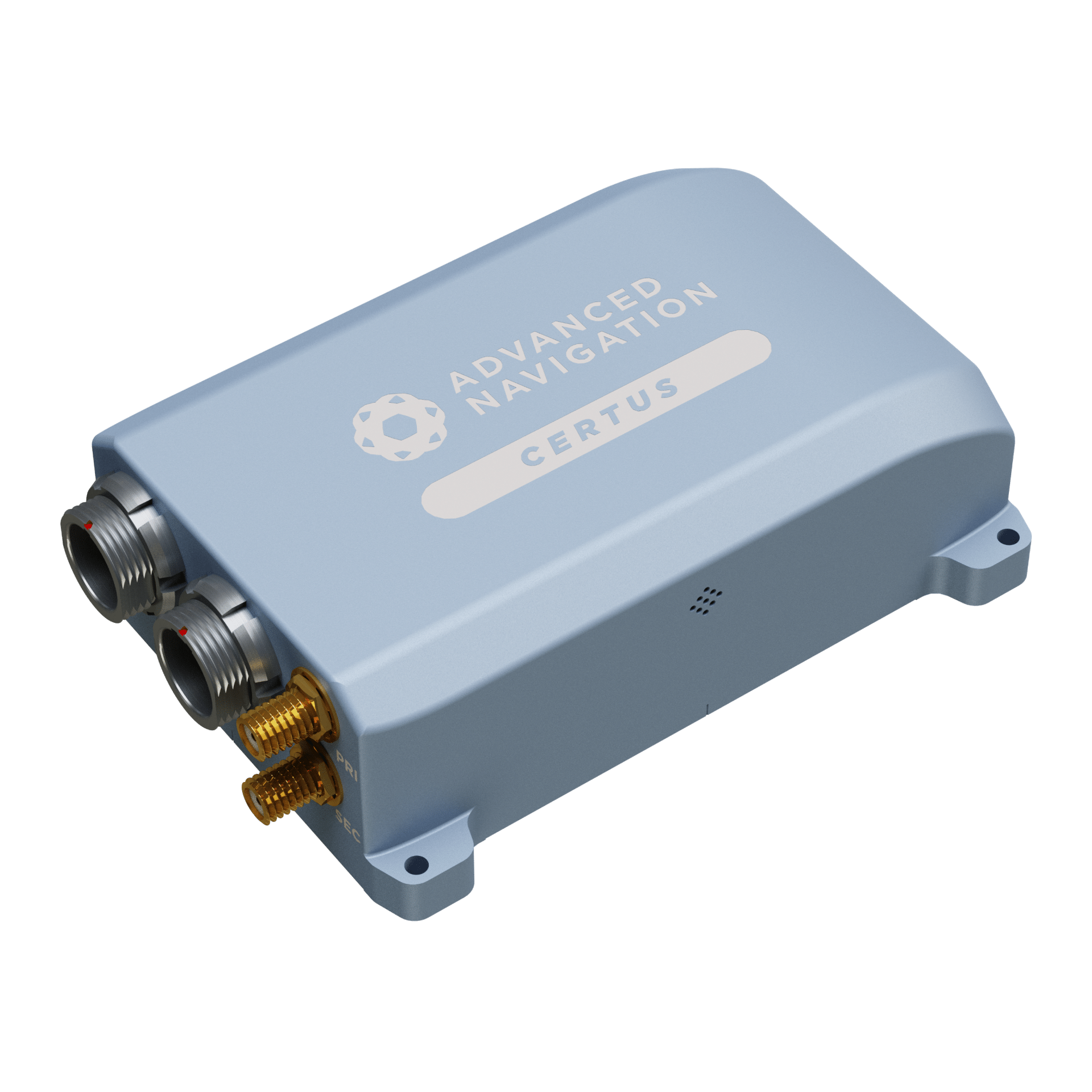
Rugged compact GNSS/INS with tactical-grade performance
Rugged compact GNSS/INS with tactical-grade performance
...act GNSS-aided inertialnavigationsystem(INS) designed for high-precision marineapplications... ...ssion-critical marine environments, making it ideal for USVs, instrumented buoys, battlefield...
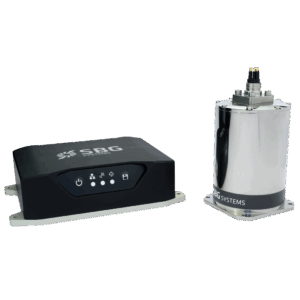
Modular navigation solution for precision hydrographic surveys
Modular navigation solution for precision hydrographic surveys
The Navsight Marine is a versatile, high-precision motion and navigation solution tailored for... ...d as a modular system, Navsight Marine offers hydrographers flexibility through configurable IMU...
...nce GNSS-aided inertialnavigationsystem(INS) tailored for demanding marine, airborne, and land... ...eal choice for marine survey systems, USVs, and payloads where precision navigation is...
...al for AUV/ROV navigation and marine survey platforms, and can be integrated with external sensors... ...alibrated MEMS inertial technology with either a single- or dual-antenna GNSS receiver with L1/L5...
Versatile inertial sensing solutions with rugged & OEM form factors
Versatile inertial sensing solutions with rugged & OEM form factors
...tile family of inertial sensor products that offers the full spectrum of functionality from IMU to... ......rdability, and are ideal for surface vessels, buoys, AUV and ROV navigation and control, and...
Compact surface-mount inertial modules with built-in sensor fusion
Compact surface-mount inertial modules with built-in sensor fusion
...s high-quality inertial output in an ultra-compact 12 x 12 mm SMD form factor. These modules are the... ......he cost-effective modules are ideal for USVs, buoys, AUV and ROV navigation and control, and...
Inertial Navigation Systems (INS) for Marine Applications
Overview by
Sarah Simpson
Updated:
Accurate navigation is fundamental to safe and effective marine operations, especially where satellite-based systems like GNSS/GPS are inaccessible or unreliable. Inertial navigation systems (INS) offer a robust alternative by delivering continuous positional data based on internal sensor measurements. In marine environments, on the surface or underwater, INS guides submarines, autonomous underwater vehicles (AUVs), remotely operated vehicles (ROVs), and ships through complex and signal-denied areas. Whether supporting subsea surveys, deep-sea exploration, or naval missions, marine INS enables precise navigation under the most demanding conditions.
What Is a Marine Inertial Navigation System?
Quanta Micro Inertial Navigation System (INS) by SBG Systems
A marine inertial navigation system (INS) is a self-contained electronic device that determines a platform’s position, orientation, and velocity by processing input from inertial sensors. These systems typically consist of accelerometers and gyroscopes that measure linear acceleration and angular rotation, respectively.
Applying Newtonian mechanics, the INS continuously calculates movement from a known starting point without relying on external signals. This makes them especially suitable for underwater or GNSS-denied environments. Marine INS units can function independently or be integrated with GNSS, Doppler velocity logs (DVLs), and other aiding sensors to enhance accuracy and correct for drift over time.
How Do Inertial Navigation Systems Work?
Inertial navigation systems work by measuring the linear acceleration and angular velocity of a platform. The system then uses these measurements to calculate changes in position and orientation over time. The core components include:
Processing units to perform sensor fusion and calculate trajectory
For marine applications, these components are typically part of a strapdown inertial navigation system, where the sensors are rigidly mounted to the platform and use algorithms to resolve position changes. Many systems use GNSS-aided or GPS-aided corrections to reduce cumulative errors, particularly in surface vessels.
Marine Applications of Inertial Navigation Systems
INS technologies are widely deployed in a variety of marine and maritime scenarios. These include:
Submarine Navigation: Submarines rely heavily on INS since they operate underwater without access to GNSS. Subsea INS units provide precise dead-reckoning capabilities critical for long-term submerged missions.
Autonomous Underwater Vehicles (AUVs): AUVs require accurate navigation for seabed mapping, pipeline inspection, and scientific research. Marine INS, often combined with DVLs, allows these platforms to navigate autonomously over long distances.
Remotely Operated Vehicles (ROVs): INS supports accurate station-keeping, positioning, and control for ROVs used in offshore oil and gas, salvage operations, and infrastructure inspection.
Surface Ship Navigation: Ships use INS to augment GNSS systems for redundancy and precise maneuvering in confined waterways, port entries, and dynamic positioning.
Underwater Positioning and Surveying: Marine INS enhances subsea positioning systems where traditional acoustic or GNSS methods are insufficient. These systems improve accuracy in hydrographic surveys and oceanographic studies.
Marine Drones and Unmanned Surface Vehicles (USVs): Similar to aerial drones, marine drones and military USVs use INS for autonomous navigation, especially when GNSS signals are blocked by structures or environmental interference.
Types of Inertial Navigation Systems Used in Marine Environments
Certus INS by Advanced Navigation
Several types of INS are suited for marine deployment, each with varying levels of precision and endurance:
Strapdown INS: Compact and rugged systems with rigidly mounted sensors, suitable for small vehicles like AUVs and ROVs.
GNSS-Aided INS: Combines INS with GNSS receivers to improve accuracy during surface operations.
MEMS-Based INS: Lightweight and cost-effective systems ideal for small platforms, though less precise than fiber optic or ring laser gyroscopes.
Subsea INS: Specifically engineered for deep-water performance and integration with acoustic and DVL-based systems.
Hybrid INS/DVL Systems: Combine inertial data with Doppler velocity measurements for improved underwater accuracy.
Comparisons and Performance Considerations
While GNSS is widely used for surface navigation, inertial navigation systems provide key advantages in scenarios where GNSS is compromised:
INS vs GNSSS: INS provides continuous navigation capability independent of external signals. GNSS, while highly accurate on the surface, can be jammed, spoofed, or unavailable underwater.
GNSS-Aided vs Standalone INS: Aided systems benefit from correction signals, making them suitable for long-duration missions where standalone drift would otherwise accumulate.
INS Accuracy
Marine INS accuracy depends on sensor grade, calibration, and the duration of unaided operation. High-end systems offer drift rates as low as 0.01% of distance traveled.
Standards and Integration Considerations
Marine inertial navigation systems are typically designed to interface with various maritime technologies and must meet relevant environmental, performance, and interoperability standards. These include:
IMO Performance Standards: Guidelines from the International Maritime Organization that define minimum performance requirements for shipborne navigation equipment.
IEC 61162 / NMEA Protocols: Common communication standards for integrating navigation systems with marine electronics, including chartplotters, autopilots, and bridge systems.
ISO 13628-6: Applicable to subsea production systems, this standard may be relevant where INS is integrated with remotely operated or autonomous subsea infrastructure.
Environmental and EMC Compliance: Many INS products are tested to withstand marine-specific conditions such as vibration, humidity, corrosion, and electromagnetic interference, based on general industry or classification society requirements (e.g., DNV, ABS).
INS units are often integrated into larger marine systems such as dynamic positioning suites, hydrographic survey payloads, or AUV control platforms. Integration requires robust data interfaces and time-synchronization protocols to ensure accurate system performance.
Manufacturers and Industry Adoption
Numerous manufacturers produce INS tailored for marine environments, offering variations in performance, durability, and sensor integration. Selection depends on mission requirements, platform type, and operational constraints. Popular applications span defense, research, commercial shipping, subsea construction, and offshore energy.
Marine inertial navigation systems continue to evolve with advances in sensor technology, data fusion algorithms, and integration frameworks. These systems remain essential for accurate and reliable navigation across the world’s oceans.
Designed for demanding autonomous systems, these compact new modules from Xsens combine high-performance inertial sensors with advanced satellite tracking to deliver centimeter-level positioning and robust navigation in challenging outdoor environments
Advanced Navigation’s case study explores how Tamboritha balanced cost, performance, and rapid deployment using the Boreas A70 for precise deepwater ROV navigation
SBG Systems introduces a modular inertial navigation system designed to provide high-end resilience against vibrations and electronic warfare for mission-critical platforms
Exail delivers hybrid long baseline positioning systems combining acoustic and inertial navigation to support subsea construction, infrastructure installation, and survey operations at depths up to 4,000 meters
OST visited Teledyne Marine at Oceanology International 2026 in London, where the company showcased sonar, navigation, oceanographic, and autonomous survey technologies
Teledyne Marine demonstrated high-resolution underwater threat detection using its SeaBat F50 forward-looking sonar during a live SeaSEC harbour protection exercise in Sweden ahead of Navy Tech & Seabed Defence 2026
As supply chain risk grows, Advanced Navigation explains how AUKUS-aligned sourcing, vertically integrated manufacturing, and flexible system design help defense INS programs maintain continuity and compliance