
Unmanned Underwater Vehicles (UUV)
Discover cutting-edge solutions from 7 leading global suppliers
IQUA Robotics discusses how it joined REPMUS 2025 at the invitation of the Spanish Navy, deploying the SPARUS II Uncrewed Underwater Vehicle (UUV) for Mine Counter-Measures (MCM), Critical Underwater Infrastructure (CUI) tasks, and interoperability evaluations with the U.S. Navy and Thales Group.
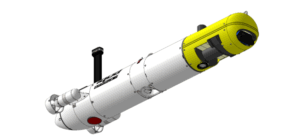
Render of SPARUS II UUV configuration for REPMUS25
The annual NATO exercise, hosted by the Portuguese Navy near Lisbon, provides a controlled setting for assessing emerging uncrewed maritime technologies.
System Configuration
For the trial, the SPARUS II platform operated with a forward looking sonar from Blueprint Subsea, a multibeam echosounder from Norbit, and an optical payload developed by IQUA Robotics.
The configuration supported several advanced functions used throughout the demonstrations:
- Automatic target detection on low-frequency FLS images.
- Real-time planning of reacquisition trajectories upon a detection.
- Multimodal contact mapping: acoustic imaging with high-frequency FLS, 3D profiles with the multibeam sonar, and optical imaging of inspected contacts.
- Onboard generation of optical maps of inspections for rapid review at the end of a mission.
- STANAG 4817 for interoperability.
- Semi-automatic APP-11 report generation.
MCM Scenario: detection, reacquisition and identification
MCM operations rely on autonomous systems that can scan wide areas and support identification. During REPMUS, SPARUS II completed several surveys in the designated mine warfare sectors.
The method combined broad detection and localized reacquisition within one mission. A predefined low frequency sonar track was used for initial scanning. When the onboard detector identified a potential contact, the vehicle paused its route and executed an autonomous maneuver to collect close range data.
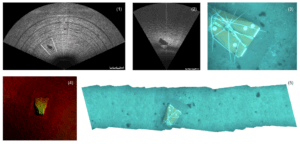
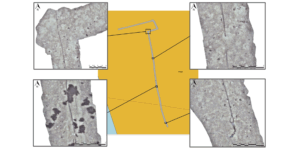
Example of results generated when a contact occurs: (1) Low-frequency forward-looking sonar image where detection occurred. (2) High-frequency forward-looking sonar image. (3) Optical image. (4) Multibeam sonar point cloud. (5) Optical mosaic of reinspection trajectory.
These measurements included optical images, high frequency sonar returns, and multibeam point clouds. After each inspection, SPARUS II resumed the planned path until the survey was complete. By mission end, all information required for object identification had been collected.
Onboard generation of optical maps enabled quick review of reacquired sites immediately after recovery, without sorting through full image sets.
CUI: detecting, tracking and mapping
Protection of subsea cables and related infrastructure is increasingly important due to their strategic role and the difficulty of monitoring them. SPARUS II tested a new optical detection and tracking method in the designated shallow CUI area.
The mission began with a low density pattern intended to cross the cable. Once the optical detector identified the cable in the imagery stream, the vehicle automatically started tracking. It followed the line to its end, adjusting its path to maintain the cable in view, then repeated the process in the opposite direction for full coverage. Post-mission processing produced a map of the tracked section, totaling 280 meters.
Trajectory mosaic and details of the mapped cable. At the beginning, the vehicle was performing a lawn-mower search pattern. In the middle of the second transect, the cable was detected, and the vehicle initiated automatic following.
STANAG 4817 Interoperability

Collaboration between the Spanish Navy and IQUA Robotics, with all UUVs participating in REPMUS25
STANAG 4817 provides a common framework for coordinated control of unmanned systems across NATO. During REPMUS, SPARUS II used the latest version of the protocol to report status and receive external tasking.
Two interoperability tests were completed. In the first, a US Navy MK18 REMUS system surveyed designated areas and issued a reacquisition task through the protocol. After receiving the task, IQUA Robotics’ control station generated a mission for SPARUS II, which reacquired both contacts and collected optical confirmation in about twenty minutes while the detection vehicle continued its scan.
A second test involved Thales Group’s M Cube system. Four contacts were assigned to SPARUS II while it was in transit, and an automatic reacquisition plan was generated to inspect each target in sequence.
IQUA Robotics’ participation in REPMUS 2025 highlighted the capabilities of the SPARUS II UUV in mine countermeasures, critical infrastructure inspection, and interoperability with allied assets. The vehicle’s sensor integration, autonomous reacquisition behaviors, optical mapping functions, and adoption of STANAG 4817 enabled efficient characterization of targets and effective coordination with US and European partners.
Read more about IQUA Robotics’ participation in REPMUS 2025 here.