Cerulean Sonar’s Omniscan FS sonar system was used during a Lake Superior expedition that successfully identified the wreck of the Steinbrenner near Isle Royale, demonstrating how compact sonar technologies are expanding access to deepwater survey and exploration work for smaller teams operating outside traditional institutional frameworks.
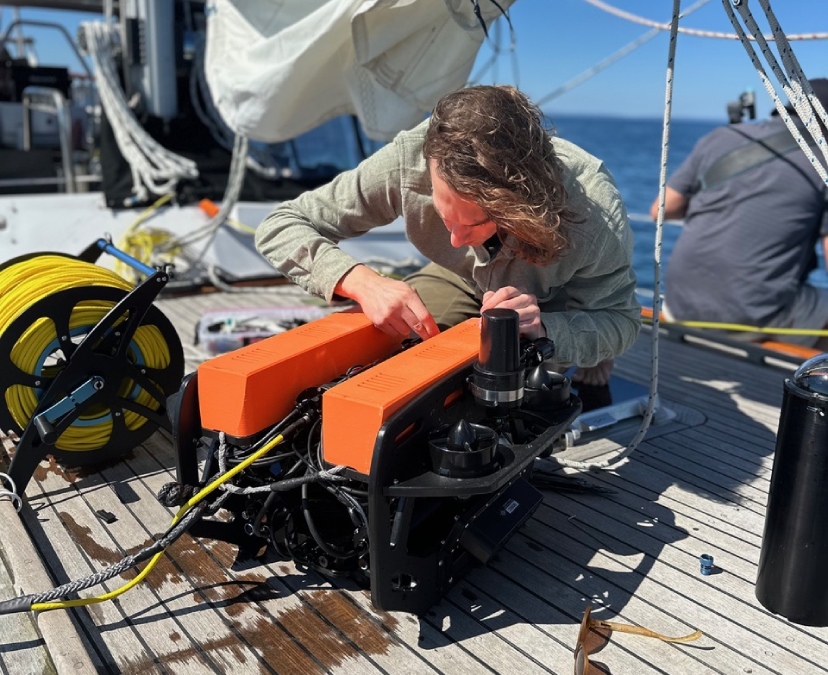
Conducted from a 52-foot Vagabond staysail schooner, the expedition centered on a purpose-built Remotely Operated Vehicle (ROV) assembled only weeks before deployment. Operating with limited infrastructure and a narrow weather window, the team set out to locate and document the wreck site using sonar imaging, live video, and tethered ROV operation in approximately 700 feet of water.
Compact Sonar Technology Expands Access to Exploration
Deepwater wreck exploration has historically relied on specialized research vessels, institutional support, and high-cost survey systems. Increasing availability of compact sonar imaging and subsea sensing technologies, however, is changing the scale at which these operations can be conducted.
Cerulean Sonar develops modular sonar and underwater sensing technologies designed for integration with ROVs, AUVs, and USVs, supporting applications including subsea imaging, positioning, and underwater survey operations. The Lake Superior expedition reflected this broader industry shift toward more accessible deepwater capability using smaller operational teams and portable equipment.
With favorable weather conditions at the start of the mission, the ROV was deployed over the approximate wreck coordinates south of Isle Royale. Early stages of the descent proceeded smoothly, with sonar quickly detecting wreck structure while tether was managed from the surface vessel.
From onboard the schooner, station keeping was maintained manually while approximately 1,000 feet of tether was deployed into the water column.
Tether Dynamics Change at Depth
As the ROV approached approximately 700 feet, conditions began to diverge from earlier shallow-water testing.
The tether, which had behaved predictably during controlled trials, reacted differently under increased pressure. Air within the line compressed and buoyancy characteristics changed, causing the tether to lose stability in the water column. What had previously remained manageable near the surface began sinking and folding onto the wreck site below.
Within moments, the tether became draped across debris scattered throughout the wreck field. Jagged sections of steel and collapsed structure created multiple entanglement points, leaving the ROV trapped across several locations simultaneously.
Live video from the vehicle showed low visibility conditions and fragmented wreckage, making spatial orientation difficult during recovery attempts.
Manual Recovery Using Sonar and Video Feedback
With no autonomous recovery capability available, the recovery depended entirely on operator control and interpretation of multiple data streams.
Using sonar alongside live video feeds, the operator worked gradually through each entanglement point using careful manual inputs from the surface. Rather than attempting rapid extraction, movements were made incrementally to avoid worsening the tether position or increasing drag within the debris field.
The process required steady control and patience. Aggressive maneuvering risked tightening the tether further while also increasing power consumption and reducing visibility.
Over time, the ROV was slowly worked free from the wreck structure and recovered back to the surface vessel. Following recovery, the team paused to reassess conditions and determine whether a second descent remained feasible as weather conditions on Lake Superior began to shift.
Second Descent Produces Successful Identification
By mid-afternoon, wind conditions were increasing and the return transit to Eagle Harbor remained several hours away. Despite the earlier complications, the decision was made to conduct a second deployment using lessons learned during the first descent.
Adjustments to tether handling and vehicle approach improved control during redeployment. Guided by sonar and positional awareness from the earlier dive, the ROV descended more cleanly toward the wreck site.
During the second deployment, Cerulean Sonar’s Omniscan FS, used in conjunction with SonarView, supported successful identification of the Steinbrenner wreck site.
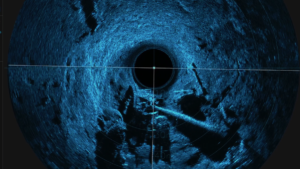
Successful Identification of the Steinbrenner Using Omniscan FS and SonarView.
Imaging at depth revealed a debris field rather than a fully intact structure, with fragmented remains distributed across the lakebed. Although visibility conditions limited conventional video imagery, sonar data combined with live visual feeds provided a more complete understanding of the wreck environment.
Combining Sonar Imaging with Live Visual Interpretation
The expedition highlighted the importance of combining multiple sensing methods in low-visibility deepwater environments.
Sonar imaging provided structural outlines, target positioning, and spatial context, while live video supplied additional visual reference where environmental conditions allowed. Together, these inputs helped the team interpret the wreck site incrementally rather than through a single continuous visual perspective.
Instead of producing a cinematic representation of the wreck, the operation relied on assembling fragmented information into a workable understanding of the underwater environment through successive sonar scans and visual confirmation.
Technology Accessibility and Operational Reality
The expedition underscored a broader operational reality within subsea exploration: improved access to compact sonar and ROV technologies does not remove environmental uncertainty, but it does expand who can attempt missions of this scale.
Success ultimately depended not only on the availability of advanced tools, but also on the ability to adapt when assumptions failed underwater. Changing tether dynamics, limited visibility, and evolving surface conditions all required continuous adjustment throughout the mission.
As the vessel turned back toward Eagle Harbor, the expedition demonstrated both the capabilities and limitations of modern compact subsea systems. Technologies such as Omniscan FS are enabling smaller teams to conduct increasingly sophisticated underwater operations, while still demanding careful interpretation, operational discipline, and real-time decision-making in challenging environments.