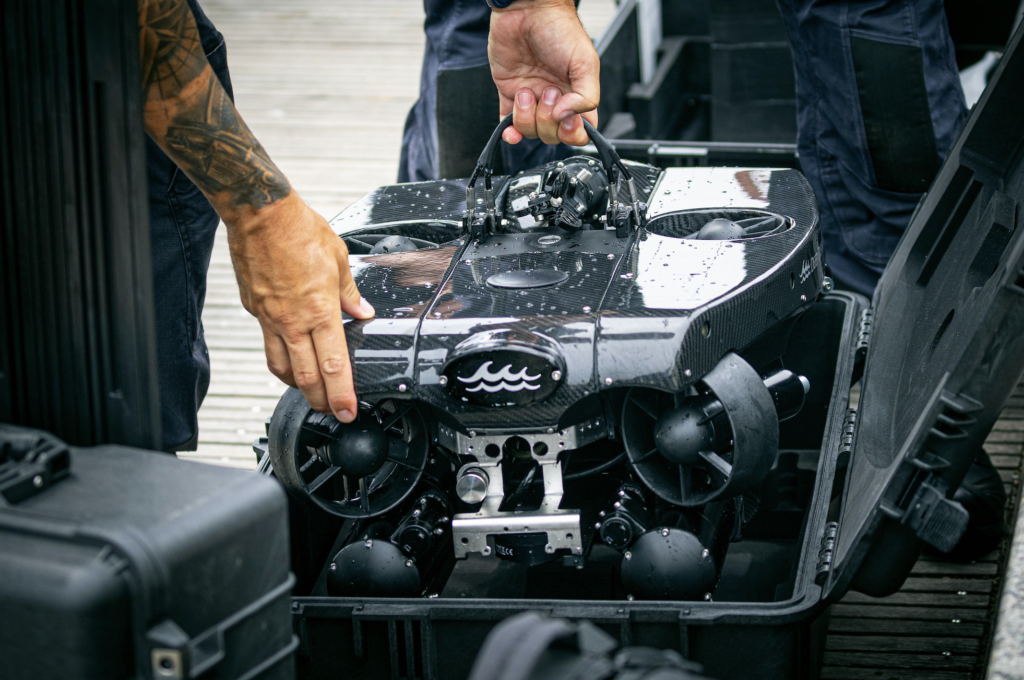


Deep Trekker, an ROV manufacturer, discusses the benefits of using remotely operated vehicles (ROVs), in which environments, and with what technology. Read more >>

The use of imaging technologies to generate 2D and 3D models is becoming far more common the field of critical infrastructure management.
In the case of submerged infrastructure, remotely operated vehicles (ROVs) are often the only way to easily capture reliable data for modeling.
The case study includes:
- Role of ROVs in Underwater Asset Management
- What is Underwater Modeling
- Challenges in Underwater Modeling
- Enhancing Underwater Modeling with ROVs
- Advancements in Automation for ROVs
- What is Deep Trekker Doing in This Space
The last of these subheadings outlines the capabilities of Project Sentry3 and Project AROWIND4, two of the projects currently involving Deep Trekker’s ROVs, with many others in the company’s pipeline. Find out more >>
The company concludes that development of unmanned vehicles relies on the interconnected progress of autonomy, 3D visualization, and machine vision. Essentially, underwater autonomy is achieved through a range of sensors, because accurate understanding of the vehicle’s position is critical for autonomous navigation and 3D modeling.

It’s important to note that there is no universal solution for every underwater challenge. Deep Trekker is dedicated to remainingat the forefront of the field by leveraging a variety of technologies. The company integrates visual sensors, positioning systems, and software capabilities to simplify inspections.
For more information, read the full article or visit Deep Trekker’s website.