Suppliers
Add your company
SBG Systems
Advanced Inertial Navigation, Motion & Positioning Solutions for Marine Applications
Platinum Partner
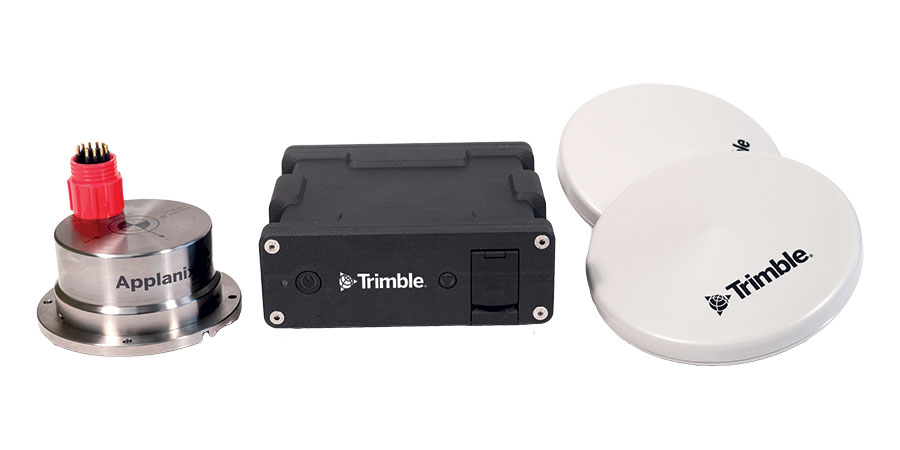
Trimble Applanix
High-Accuracy Positioning, Orientation & Navigation Systems for Marine & Maritime Applications
Platinum Partner

Advanced Navigation
High-Accuracy Inertial Sensors & Acoustic Positioning Systems for Marine, Maritime & Offshore Applications

Platinum Partner

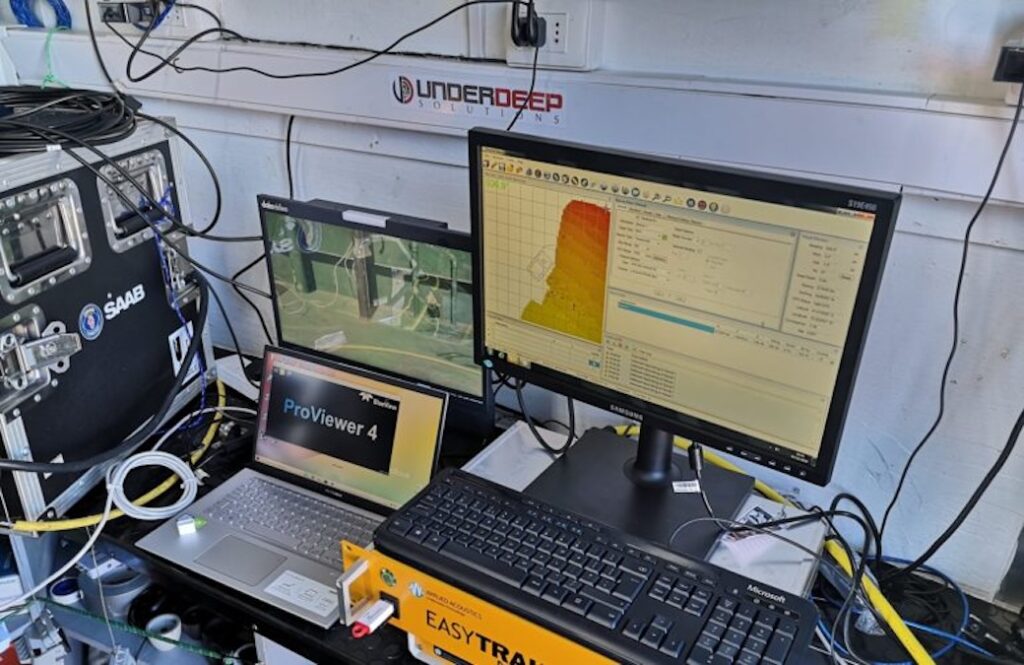
Applied Acoustics
Innovative Subsea & Marine Navigation, Positioning & Survey Solutions
Silver Partner
Showcase your capabilities
If you design, build or supply Underwater Positioning, create a profile to showcase your capabilities on this page
Products
Underwater Positioning Systems for ROVs, UUVs, and Submersibles

In underwater environments, precise navigation and accurate location tracking of vehicles are critical. From real-time tracking to long-duration autonomous missions, subsea platforms require robust positioning data. Whether through acoustic signals, inertial measurement units (IMUs), or simultaneous localization and mapping (SLAM), these systems help maintain orientation, spatial awareness, and accurate records of mission activity.
Key applications include submarine positioning systems for military use, underwater navigation for scientific research, and remotely operated vehicle (ROV) positioning in the offshore energy sector. Reliable subsea navigation also enables repeatable data collection, targeted sampling, and safe maneuvering around underwater structures.
Types of Underwater Positioning System
Acoustic positioning systems
Acoustic positioning systems are the most widely used methods for tracking subsea vehicles. They determine location based on the travel time of sound waves through water. Three main variants exist, each suited to different operational needs.
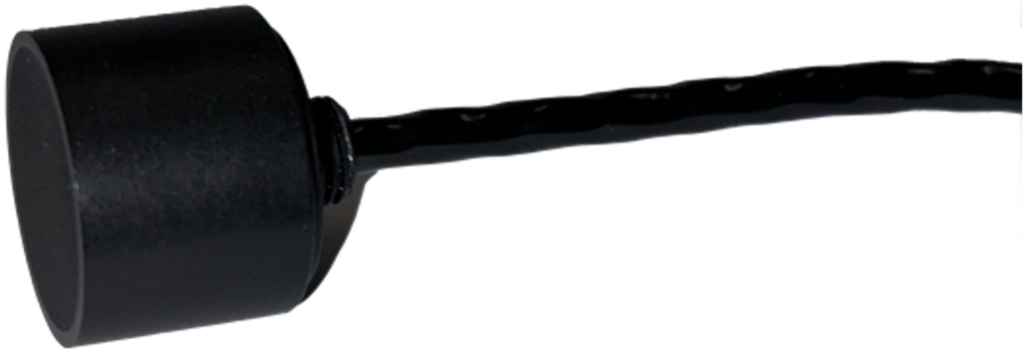
USBL (ultra-short baseline)
Easytrak USBL Systems by Applied Acoustics.
USBL systems consist of a transceiver mounted on a surface vessel and a transponder fixed to the subsea vehicle. The transceiver sends an acoustic ping, receives a response, and calculates the vehicle’s position based on signal timing and angle of arrival.
Applications:
- Underwater positioning for ROVs during inspection, repair, and maintenance
- Dynamic tracking of UUVs and submersibles
- Submarine positioning systems in coastal or mid-depth operations
USBL is valued for its rapid deployment and mobility, making it ideal for missions where a support vessel follows the vehicle.
LBL (long baseline)
LBL positioning uses a fixed array of acoustic beacons placed on the seafloor. The ROV or UUV interrogates these beacons and calculates its position by triangulating signal return times.
Applications:
- High-precision subsea construction and infrastructure monitoring
- Deep-sea mapping and scientific research
- Underwater navigation systems for autonomous operations
LBL provides centimeter-level accuracy and stable positioning over long durations, though it requires time to deploy the seabed infrastructure.
SBL (short baseline)
SBL systems involve multiple transducers mounted on a vessel or a stationary frame. These transducers triangulate the position of a vehicle-mounted transponder by analyzing the timing of acoustic signals.
Applications:
- Harbor surveys and coastal research
- Localized tracking of ROVs and divers
- Medium-accuracy subsea positioning in nearshore projects
SBL offers a balance of simplicity, accuracy, and rapid setup, making it well-suited for medium-range underwater tracking.
Inertial navigation systems (INS)
INS units calculate position, velocity, and orientation by processing data from an onboard inertial measurement unit (IMU), which includes gyroscopes and accelerometers to measure motion and rotation. While the IMU provides the raw data, the INS uses algorithms to compute navigational information over time. Because INS can experience drift due to sensor errors, they are often integrated with external references such as acoustic positioning systems or GNSS (GNSS/INS) to enhance accuracy and correct accumulated errors.
Applications:
- Dead reckoning for UUVs in GNSS-denied areas
- High-speed pipeline inspection with ROVs
- Navigating under ice or in acoustic-challenged environments
INS is often integrated into hybrid systems, such as GNSS/INS, for continuous navigation across both surface and subsurface segments.
Simultaneous localization and mapping (SLAM)
SLAM systems allow underwater vehicles to create a real-time map of their environment while simultaneously estimating their position within that map. These systems often use sonar or underwater LiDAR sensors, enabling navigation in unknown or dynamic environments.
Applications:
- Autonomous navigation in unexplored subsea terrain
- Submarine positioning systems in complex structures
- Marine archaeology and environmental monitoring missions
SLAM is ideal for missions requiring autonomy, especially in areas where no external infrastructure exists or where real-time updates are critical.
Hybrid and surface-referenced solutions
In addition to standalone systems, many subsea vehicles utilize hybrid solutions that combine GNSS, acoustic, and inertial inputs. One example is an “underwater GPS” system, where GNSS data from a surface buoy or vessel is relayed via acoustic modems to a submerged vehicle.
Applications:
- Dynamic operations with ROVs and AUVs
- Vessel positioning and subsea positioning with surface fix support
- Survey-grade positioning over long distances
These systems ensure consistent navigation performance in variable environments, supporting extended missions and improving spatial awareness.
Underwater Positioning for Different Platforms
ROV positioning systems
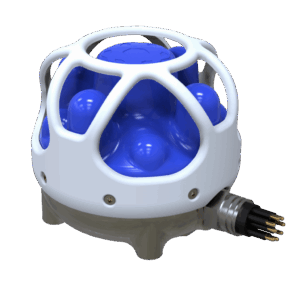
Subsonus by Advanced Navigation.
ROVs conducting inspection, construction, or scientific work rely on USBL or SBL for real-time positioning, often supplemented by INS for motion tracking. Applications include pipeline inspection, structural monitoring, and environmental sampling.
UUV and AUV navigation
Unmanned platforms depend on SLAM, GNSS/INS, and acoustic systems for autonomous navigation. INS offers dead reckoning, while LBL arrays or surface relays provide position updates when needed.
Submarine positioning systems
Manned submersibles and military submarines use LBL, INS, and SLAM for stealth navigation. Geomagnetic and gyroscopic navigation techniques may be incorporated for redundancy and drift correction.
Scientific and environmental missions
Scientists conducting benthic surveys or habitat studies require precise localization. LBL and underwater GPS systems support mapping, sample collection, and long-term monitoring.
Offshore construction and energy
LBL and INS solutions offer the precision required for installing subsea infrastructure. Accurate ROV positioning supports weld inspection, flange alignment, and real-time reporting.
Selecting the Right Underwater Positioning System
An underwater positioning system is crucial for enabling safe and accurate navigation in GNSS-denied environments. Acoustic positioning, including USBL, LBL, and SBL, provides versatile and accurate tracking for a range of subsea applications. Inertial systems offer autonomy and resilience, while SLAM unlocks navigation in uncharted environments. Hybrid solutions further enhance reliability by combining multiple data sources.
Whether you’re managing a remotely operated vehicle (ROV) on a construction project, deploying an underwater vehicle (UUV) for seafloor mapping, or guiding a research submarine, selecting the right underwater positioning technology ensures operational efficiency, mission success, and data integrity.