Suppliers
Add your company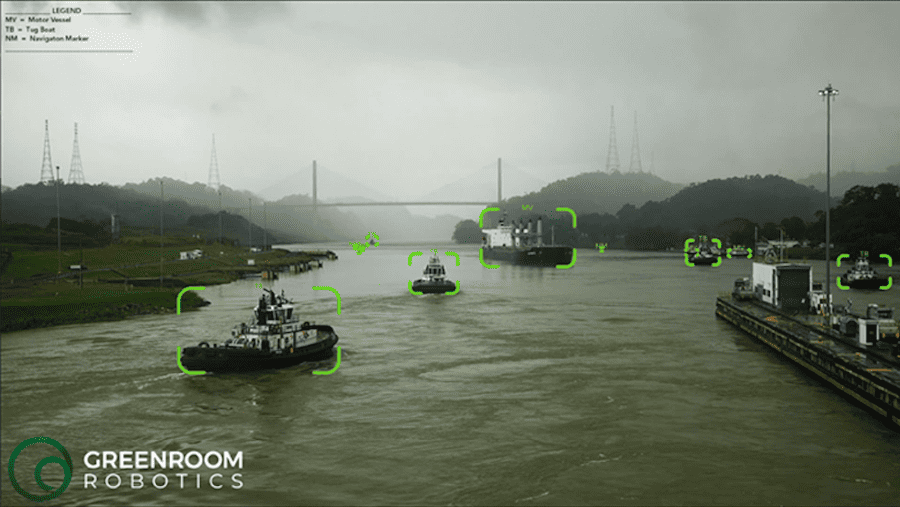
Greenroom Robotics
Cutting-Edge Software & AI Solutions for Enabling Maritime Autonomy At Scale
Gold Partner

Maritime Robotics
Innovative Autonomy & Uncrewed Vessel Technologies for Maritime Operations
Gold Partner
Robosys Automation
AI-Powered Maritime Autonomy & Remote Control Solutions for Government & Commercial Vessels
Silver Partner

Dynautics
Marine Vehicle Management Technologies: Marine Autopilots, Remote Control Systems, and Simulation Solutions
Silver Partner
Showcase your capabilities
If you design, build or supply Autonomous Control Systems, create a profile to showcase your capabilities on this page
Products
Autonomous Control Systems for Marine & Subsea Robotics

Autonomous control systems serve as the central intelligence in unmanned maritime platforms, orchestrating a network of interconnected subsystems to perform complex missions without human intervention.
These systems combine real-time data processing, environmental awareness, and adaptive control algorithms to maintain vessel stability, navigate dynamic waters, and execute mission-specific tasks across various marine domains.
Technological Foundation of Marine Autonomous Control Systems
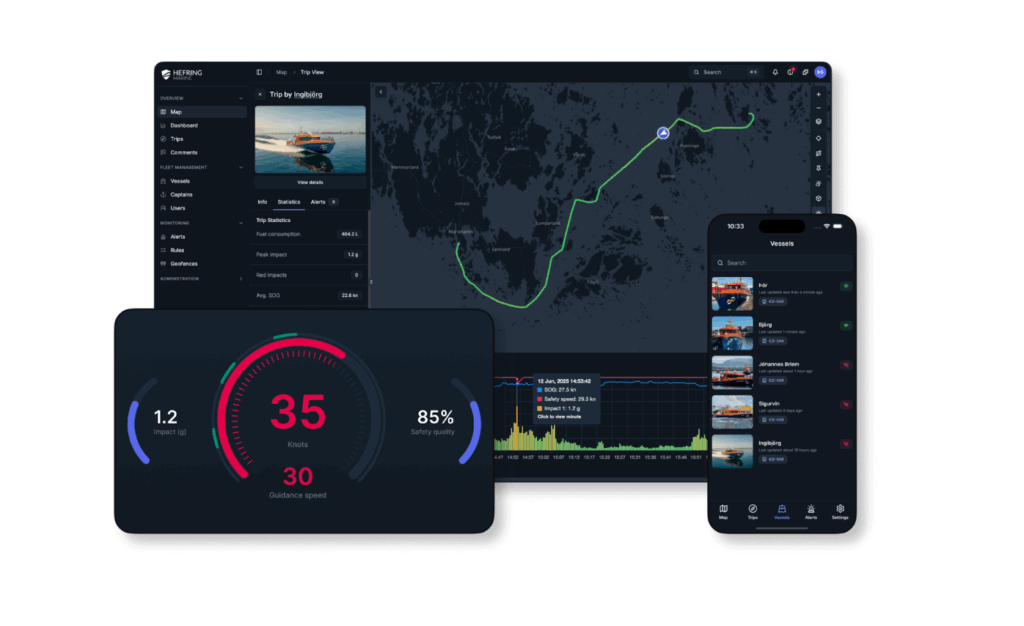
Autonomous control system from Robosys, the Voyager AI autopilot.
At the core of these control systems are high-precision navigation and motion sensing components. Inertial Navigation Systems (INS), built from Inertial Measurement Units (IMUs) and Attitude Heading Reference Systems (AHRS), deliver continuous tracking of position, velocity, and orientation. This is essential for submerged operations where GPS signals are unavailable. These components work together to provide accurate geospatial awareness and help autonomous systems maintain course and stability, even under challenging environmental conditions.
Dynamic positioning systems further enhance navigational control by leveraging sensor fusion and feedback loops to automatically adjust propulsion and steering, enabling vessels to hold station or follow complex paths with high precision. These systems often include marine autopilot functions, control architectures for motion compensation, and integration with depth sensors and vision systems.
Autonomy in Underwater & Surface Platforms

Marine Autopilot, SPECTRE, from Dynautics.
For USVs and UUVs operating in open oceans or coastal zones, autonomous control systems must adapt to rapidly changing conditions. Vision systems and optical sensor arrays help recognize objects, detect obstacles, and avoid collisions in both surface and subsea environments. These situational awareness systems are increasingly powered by artificial intelligence, enabling vessels to make decisions based on real-time environmental data.
Battery management systems and power management architectures ensure optimal energy use across long missions, reducing energy consumption, increasing operational efficiency, and extending battery life. These power systems are often tied into a broader control framework that monitors system health and balances power demands between propulsion, onboard sensors, and communication modules.
Marine robotic platforms, such as remotely operated or fully autonomous underwater rovers, require precise control over robotic arms and other manipulators. Control sensors and electronic actuators interface with centralized control units to perform delicate tasks like sampling, inspection, or repairs in subsea infrastructure. These robotic subsystems are governed by modular autonomous vehicle control systems that synchronize mechanical actions with environmental inputs and mission plans.
Applications & Mission Profiles
Autonomous control systems support a wide range of applications across maritime industries, including offshore energy, scientific research, naval defense, and commercial shipping. Typical mission profiles may include seafloor mapping, pipeline inspection, environmental monitoring, cargo delivery, and tactical reconnaissance.
Each scenario demands a combination of reliability, adaptability, and safety. For example, mission planning systems incorporate data from temperature sensors, INS, and vision systems to design optimized paths that reduce risk and minimize human error. Automatic steering systems, integrated with real-time obstacle detection, ensure that vessels can maintain their course even in heavily trafficked or cluttered waterways.
In defense operations, autonomous vehicle control systems are increasingly required to handle multi-layered tasks, such as tracking, target recognition, and synchronized swarm behavior, without direct oversight. These capabilities are underpinned by advanced software frameworks that merge real-time analytics, AI-driven control logic, and robust hardware interfaces.
Design Considerations & System Integration
Modern autonomous control systems are designed with modularity in mind. They enable integration with a wide range of maritime platforms and support upgrades as technology evolves. Developers must account for the interplay between control layers, from low-level motor actuation to high-level mission execution.
Control architectures are typically built to accommodate hybrid propulsion, variable sensor payloads, and different modes of autonomy, from supervised remote operations to fully autonomous missions. To ensure reliability, systems must continuously monitor system health, adjust for environmental fluctuations, and maintain a safe operational envelope throughout the mission duration.
Reshaping the Landscape of Waterborne Autonomy
Autonomous control systems represent a convergence of precision engineering, advanced computing, and environmental awareness in the maritime sector. By coordinating navigation, propulsion, sensing, and task execution, these systems enable a new class of robotic platforms capable of performing sophisticated missions with minimal human oversight. From controlling UUVs in deep-sea surveys to managing USV fleets for harbor security, these technologies are reshaping the operational landscape of waterborne autonomy. With ongoing advancements in inertial sensing, situational awareness, and adaptive control, autonomous control systems will continue to expand their capabilities and reliability across the full spectrum of marine and subsea applications.