AHRS (Attitude and Heading Reference Systems) for Underwater Vehicles and Platforms
Attitude and Heading Reference Systems (AHRS) are critical for operating and navigating underwater vehicles, including remotely operated vehicles (ROVs) and unmanned surface vehicles (USVs). These advanced systems use sensors to provide accurate data on pitch, roll, yaw, and heading, ensuring stability and precise maneuverability in challenging underwater environments. By integrating gyroscopes, accelerometers, magnetometers, and sophisticated algorithms, AHRS delivers essential orientation information to enhance the efficiency and safety of underwater missions.
If you design, build or supply AHRS (Attitude and Heading Reference Systems), create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.
AHRS (Attitude and Heading Reference Systems) for Underwater Vehicles and Platforms
Overview by
Sarah Simpson
Updated:
What is an AHRS (Attitude and Heading Reference System)?
MEMS Attitude and Heading Reference System (AHRS) by Advanced Navigation.
An AHRS, or Attitude and Heading Reference System, is a multi-sensor system designed to calculate an object’s orientation by providing real-time data on pitch, roll, and yaw. Unlike simpler gyroscopic instruments, AHRS integrates data from multiple sources, including accelerometers, gyroscopes, and magnetometers, to correct for drift and provide accurate, stable readings over time.
AHRS ensures precise heading and stability during operations in underwater vehicles like ROVs and USVs, compensating for environmental challenges such as strong currents and varying magnetic fields. These systems are critical for tasks that require precise positioning, such as deep-sea exploration, pipeline inspections, and environmental monitoring.
How Does an AHRS Work in Underwater Platforms?
An AHRS uses a combination of sensors (see key components below) to measure the motion and orientation of an underwater vehicle.
These sensors continuously feed data into sophisticated algorithms, such as a Kalman Filter (a method for making accurate predictions from noisy data), which processes the data to reduce noise and correct errors caused by drift or external disturbances. The system can deliver reliable orientation data even when the underwater vehicle encounters turbulence or other environmental disruptions.
Key Components of AHRS Systems
Gyroscopes
Gyroscopes are essential for detecting rotational movement.
Accelerometers
Accelerometers assist in maintaining stability and correcting for tilt.
Magnetometers
Magnetometers provide heading data by measuring the earth’s magnetic field.
The integration of these components allows AHRS to maintain accurate orientation data, even during complex underwater missions.
Applications of AHRS in ROVs and USVs
AHRS technology is widely employed in various underwater vehicles for several critical applications:
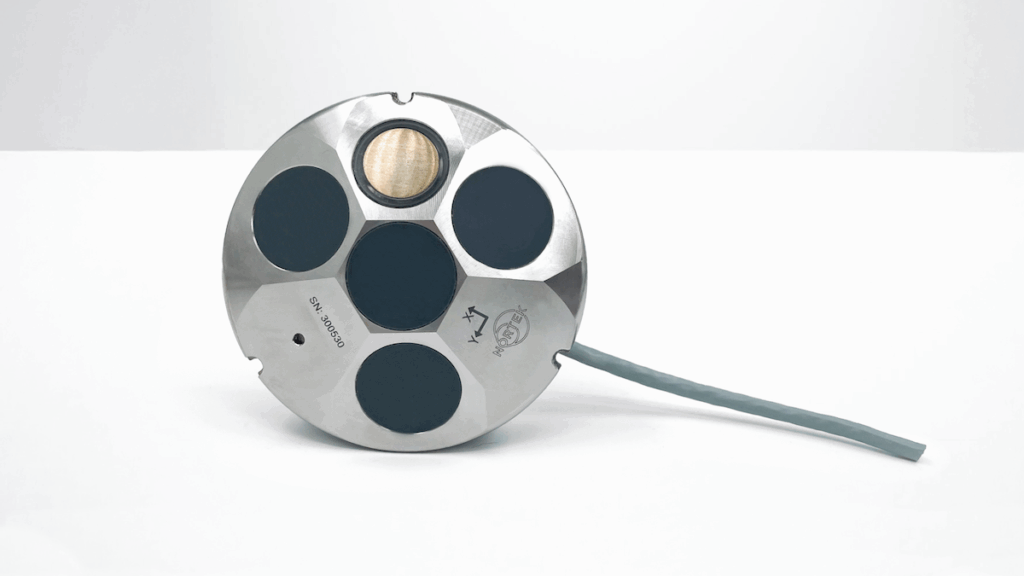
AHRS (Attitude and Heading Reference System) for underwater vehicles by Impact Subsea.
Navigation
AHRS systems provide essential heading and orientation data, enabling accurate navigation in challenging underwater environments. By continuously updating the vehicle’s pitch, roll, and yaw, AHRS ensures that remotely operated vehicles (ROVs) and unmanned surface vehicles (USVs). stay on course, even when dealing with strong currents or low visibility. This precision is vital for reaching target locations and executing complex underwater missions effectively.
Stability Control
Maintaining stable movement is crucial for underwater tasks like seabed mapping, object retrieval, or sampling. AHRS helps ROVs and USVs stay level and steady by providing real-time attitude data, which compensates for external disturbances. This stability allows for smoother operations and improves the accuracy of tasks that require delicate maneuvers, such as interacting with fragile underwater structures.
Teleoperation
Real-time feedback is essential for precise control of remotely operated vehicles (ROVs). AHRS systems deliver continuous updates on the vehicle’s orientation, giving operators on the surface a clear picture of the ROV’s or USV’s position and movement. This enhances maneuverability and allows for more responsive handling, reducing the likelihood of collisions or errors during critical missions.
Survey and Inspection
AHRS technology is extensively used in underwater surveys and inspections of infrastructure, such as pipelines, ship hulls, and subsea installations. Accurate pitch, roll, and heading data ensure that the vehicle maintains the correct orientation while collecting visual or sensor data. This reliability is essential for identifying potential issues, mapping areas, and ensuring that inspection tasks are carried out thoroughly and efficiently.
Course-Keeping for USVs
Unmanned surface vehicles often perform long-duration missions, where maintaining an accurate course is critical. AHRS systems help USVs by correcting drift and stabilizing their orientation over time. This capability is particularly important in applications like oceanographic research, maritime security, or environmental monitoring, where precise path-following is necessary to achieve mission goals.
For USVs, AHRS ensures accurate course-keeping, particularly during long-duration missions where drift correction and stability are vital.
Benefits of AHRS for Underwater Platforms
Accurate Orientation Data: Combines sensor inputs to deliver real-time pitch, roll, and yaw measurements.
Error Correction: Advanced algorithms minimize drift and correct errors caused by environmental factors.
Improved Stability: Enhances vehicle stability, which is essential for precise operations.
Challenges and Solutions in Underwater AHRS Systems
Underwater environments pose unique challenges for AHRS, including:
Magnetic Interference: Underwater metal structures can distort the magnetic field. Calibration and filtering algorithms help mitigate this issue.
Gyroscopic Drift: Long-duration missions can lead to drift errors. Solutions such as Kalman Filters and error correction algorithms minimize drift over time.
Pressure and Depth Variations: Advanced altitude and pressure sensors ensure AHRS systems remain functional at varying depths.
AHRS Failure Considerations
In critical underwater missions, the reliability of an Attitude and Heading Reference System (AHRS) is essential for successful operation. AHRS failure can lead to inaccurate heading, pitch, and roll data, compromising navigation, stability, and overall mission success. Because underwater environments are inherently challenging — with factors like strong currents, low visibility, and magnetic interference — any malfunction in the AHRS can severely impact the vehicle’s ability to complete its tasks accurately.
To mitigate the risks of AHRS failure, redundant systems are often employed. By having backup AHRS units onboard, an immediate switch to a secondary system can occur if the primary unit fails. This redundancy ensures continuous operation and minimizes mission disruption, particularly during extended or high-stakes missions like pipeline inspections or deep-sea exploration.
Additionally, regular calibration is essential to maintain the accuracy of AHRS readings. Calibration helps correct sensor drift, magnetic interference, and mechanical wear, ensuring the system operates within acceptable error margins. Routine calibration procedures, especially before critical missions, help prevent discrepancies in orientation data.
Furthermore, integration with other sensors such as Inertial Measurement Units (IMUs) and Inertial Navigation Systems (INS) provides an additional layer of reliability. These systems can cross-verify data from the AHRS and offer backup orientation and navigation information. If the primary AHRS encounters issues, IMUs — which combine gyroscopes, accelerometers, and sometimes magnetometers — can fill in the gaps, maintaining situational awareness. Similarly, INS provides continuous navigation data by processing inertial sensor inputs, helping correct for AHRS errors or failures.
By implementing redundancy, maintaining calibration, and integrating complementary sensors, underwater platforms can significantly reduce the risk of AHRS failure, ensuring consistent performance and mission success in even the most demanding environments.
Why Use AHRS for Underwater Vehicles
AHRS systems are indispensable for the accurate navigation and operation of underwater platforms such as ROVs and USVs. By providing precise data on pitch, roll, yaw, and heading, these systems enhance vehicle stability, efficiency, and safety. Leveraging advanced sensors, algorithms, and error correction techniques, AHRS ensures reliable performance even in challenging underwater conditions. As underwater exploration and inspection demands grow, AHRS technology will continue to evolve, offering increasingly sophisticated solutions for the maritime industry.
Xsens examines how its MTi-3 Attitude and Heading Reference System delivers reliable orientation, stabilization, and positioning for Meox underwater robotic systems used in subsea cleaning and inspection
Impact Subsea has appointed Spry Technocon as its new distributor in India, enhancing regional support and access to advanced underwater sensor technologies
SBG Systems is showcasing its precision inertial navigation, motion, and positioning solutions on OST, offering robust, ITAR-free sensors designed for a wide range of marine applications
Nortek has launched an OEM housing for its Nucleus 1000 sensor package, simplifying integration into small ROVs and AUVs while enhancing hydrodynamics and operational performance
Impact Subsea’s ISFMD system was integrated with Outland Technology’s ROV-3000 for offshore inspection operations conducted by Offshore Drone Inspection Services
Xsens has provided the critical MTi-300 sensor technology used by Tachysséma Développement to deliver real-time wave motion analysis for the OCG-Data buoy, facilitating the global expansion of offshore wind capacity