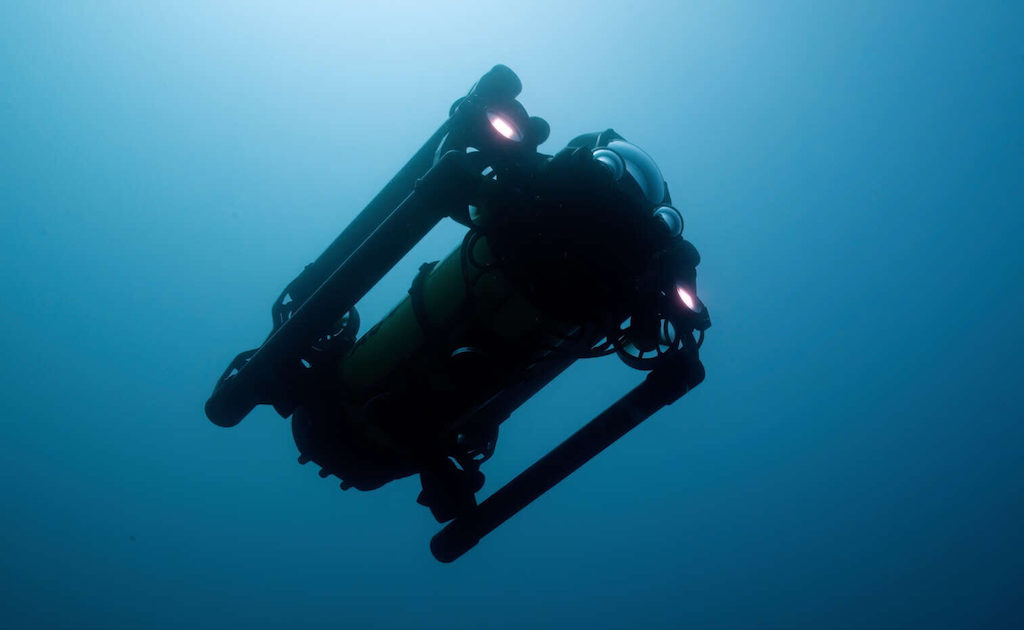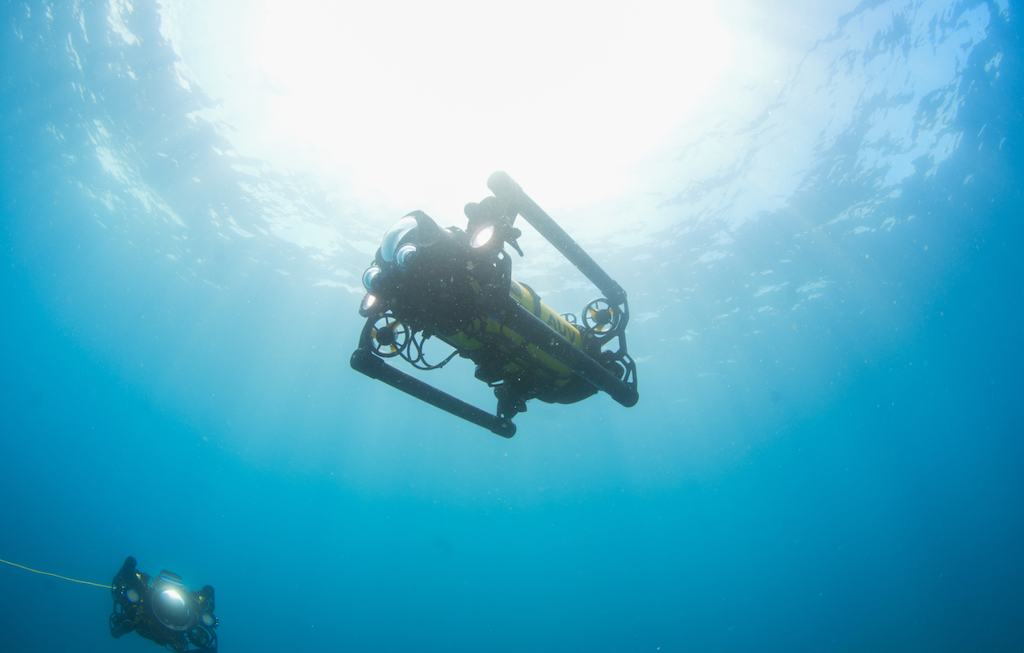
Boxfish Robotics’ tetherless, hovering autonomous underwater vehicle (AUV), the Boxfish AUV, offers six degrees of freedom and dynamic stabilization, with depth options of 300m and 600m.
Its expandable architecture supports both autonomous operation and the option for fully manual, tethered operation. The Boxfish AUV offers a range of up to 6km on a single charge.
With the capacity for up to four free ports for connecting optional sonar and environmental sensors, the Boxfish AUV becomes a powerful tool for repeatable autonomous inspection tasks.
The Boxfish AUV operates up to 600 meters underwater, using stereo cameras, USBL, IMU, and DVL for precise navigation. The combination of these sensors and proprietary autonomy algorithms enables reliable mission execution in diverse environments.
The AUV’s mission planning software, Boxfish SafePath Planner, serves as the graphical user interface for mission setup. Users can create survey paths with waypoints, adjust vehicle pitch, speed, lighting, distance from objects, depth, and altitude at any waypoint. The software supports grid patterns and simple transects, and missions can be saved for repetitive surveys.
Boxfish Commander software provides live updates on AUV telemetry and mission progress, including distance to the next waypoint. Users can also monitor the mission live on a webpage and replay past missions for detailed analysis.
Key features:
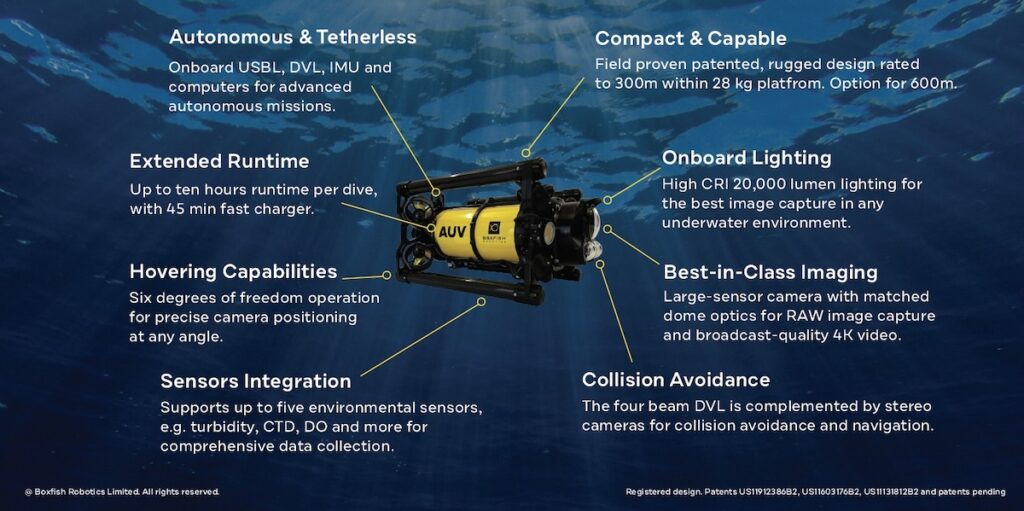
The Boxfish AUV is ideal for a wide range of applications, including benthic surveys, coral reef monitoring, coral bleaching studies, artificial reef monitoring, photogrammetry, seabed mapping, fish studies, and invasive species research.
Find more information and specifications about the Boxfish AUV >>