




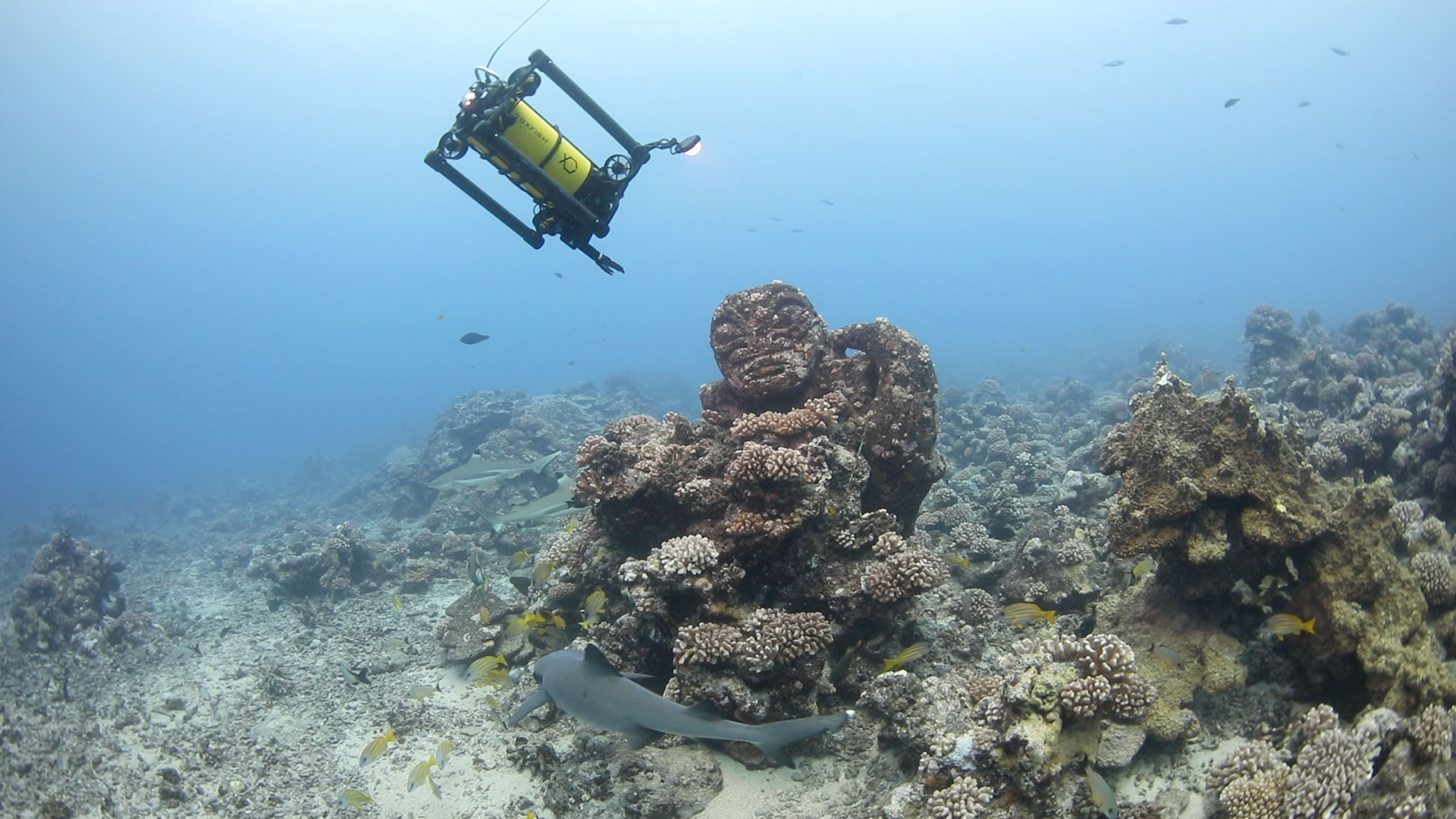
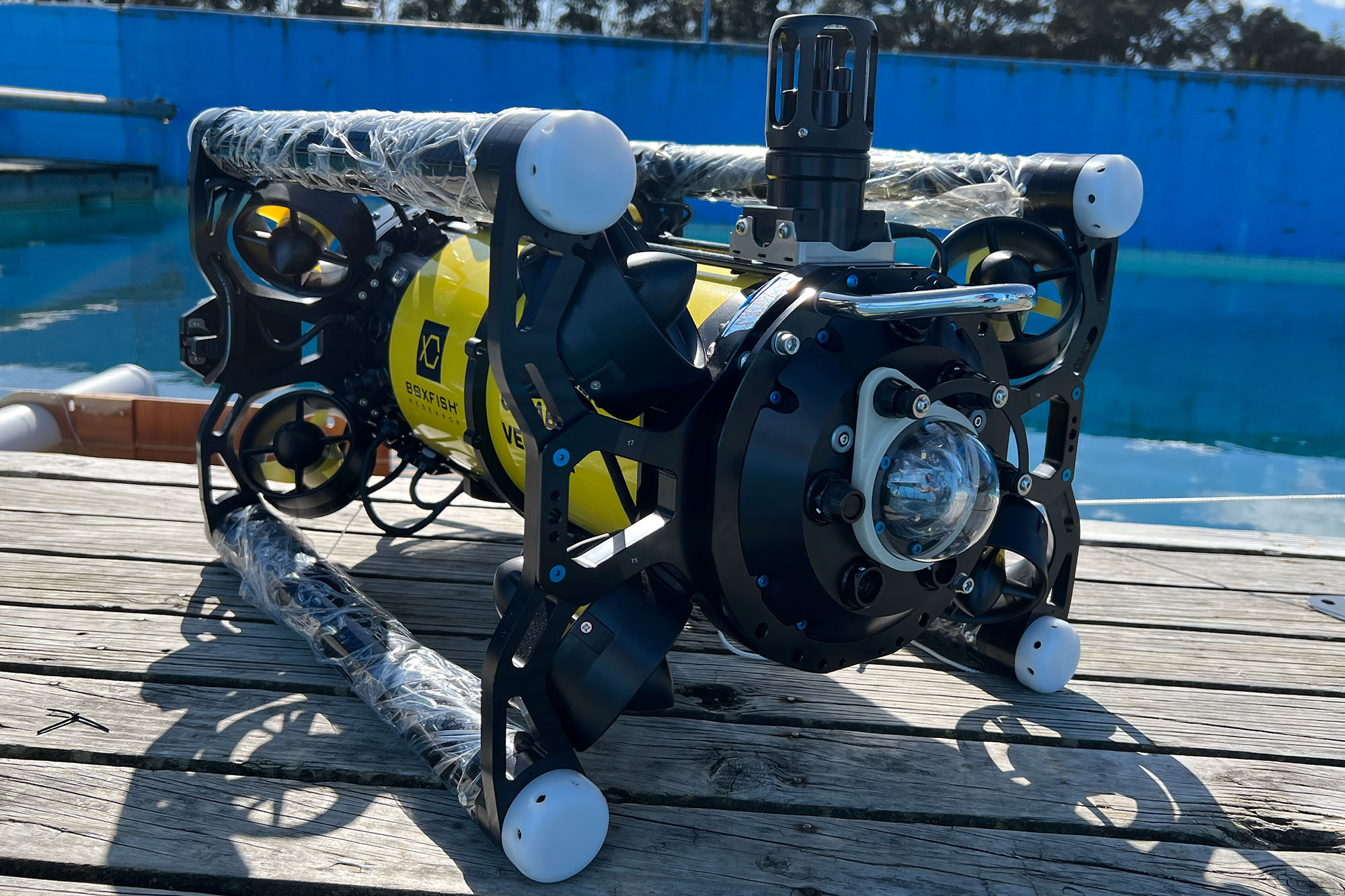

The Boxfish AUV is a next-generation tetherless hovering autonomous underwater vehicle engineered for advanced oceanographic research and precision inspection. Designed for seamless six-degree-of-freedom operation, it maintains exceptional stability and maneuverability even in complex underwater environments.
Proprietary mission planning via Boxfish SafePath Planner enables detailed waypoint control, including pitch, lighting, and speed. Combined with the Boxfish Commander interface, operators receive real-time telemetry and post-mission data analysis, making it an essential tool for detailed marine exploration and long-term environmental monitoring.
Equipped with a robust array of integrated navigation sensors—USBL, DVL, IMU, and stereo vision—the Boxfish AUV ensures pinpoint accuracy and adaptive mission execution. Its modular design accommodates up to four payload ports for optional sonar and environmental sensors.
With configurable depth ratings of 300 or 600 meters, and a mission range of up to 6 kilometers on a single charge, this system supports repeatable, autonomous deployments for applications including coral reef monitoring, seabed mapping, and invasive species research.
Specifications:
| Dimensions (L×W×H): | 730 mm × 435 mm × 351 mm |
| Weight: | 25 kg (including salt water ballast) |
| Depth Rating: | 300 m or 600 m |
| Range: | Up to 6 km |
| Maximum Endurance: | Up to 10 hours |


