
Subsea Imaging Systems
Discover cutting-edge solutions from 11 leading global suppliers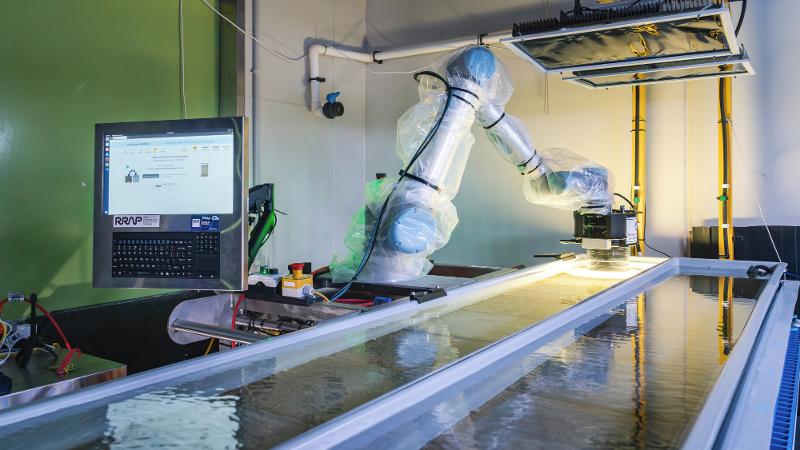
A robotic system developed to count and capture images of baby tank-grown corals destined for the Great Barrier Reef will save scientists over 7200 hours of infeasible and repetitive coral counting time each week.
Dr. Dorian Tsai, Associate Investigator at the QUT Centre for Robotics and Research Fellow for the QUT School of Electrical Engineering and Robotics, spoke about the Coral Growout Robotic Assessment System (CGRAS) project.
CGRAS is a collaboration involving the Australian Institute for Marine Science (AIMS), Reef Restoration & Adaptation Program (RRAP), and the QUT Research Engineering Facilities (REF) team.
Most other coral restoration techniques are primarily focused on fragmenting existing corals – a technique known as coral fragmentation, typically limited to approximately 50 fragmented corals per origin or donor colony, which has limited scalability.
CGRAS is aiming to mass-reproduce corals via sexual reproduction, where parent colonies can produce over a million corals each, allowing the scientists to ensure the corals can diversify and adapt to changing environments — a method that has much better scalability.
AIMS Research Program Director of Reef Recovery, Adaptation & Restoration, Dr Line Bay, said AIMS scientists are developing methods to assist the Great Barrier Reef better cope with the effects of climate change; “Projects like CGRAS are essential parts of the technology toolkit needed to deliver scale in this work. We clearly need strong emissions reduction to provide the best future for coral reefs.
“But with a fifth mass coral bleaching event since 2016 unfolding on the Reef research into restoration and adaptation is also important. Projects like this will turbo-charge R&D into conservation aquaculture methods that aim to help the Reef cope with increasing temperatures.”
Dr Tsai said CGRAS was actively deployed in the National Sea Simulator (SeaSim) at AIMS near Townsville early this year, and its next iteration will be deployed for the next coral spawning in December 2025; “The difficulty is that we have to then be able to grow and monitor these baby corals in order to keep the corals happy and healthy, which CGRAS aims to solve.
“The challenge is that when we are growing corals en masse during their growout phase inside tanks on flat tiles, the corals are tiny, about 1mm in diameter. There are hundreds of thousands of these corals, and it takes on average 45 minutes for a trained expert to count a single coral tile, which is 28x28cm square. Eventually there will be over 9600 such tiles.”
He continued; “To do it manually, this would end up costing around $500k per week in labour, which amounts to easily $6 million/year over a 12-week growout period for just counting corals.
“That’s why we’ve developed a robot prototype to capture images of the baby corals in the tanks as they are growing in a repeatable, precise and flexible manner. We’re also leveraging state-of-the-art artificial intelligence algorithms to automatically detect and count these coral babies and track their growth over time.
“This will allow scientists to have a much clearer correlation analysis between their treatment strategies and coral growth, leading to higher coral survival rates, which is higher coral yield, which will allow RRAP to reach their large-scale deployment scenarios of over a million corals out to the Great Barrier Reef each year.”
Dr. Tsai is assisting a QUT research team that includes Senior Project Specialist in Industry Development, Karen Jackel, Research Engineering Facilities (REF) Team Principal Engineer Garima Samvedi, REF Senior Research Engineer, Riki Lamont, REF Senior Research Engineer, Timothy Morris, REF Senior Research Engineer, Dr. Andrew Lui, and REF Research Engineer, Joshua Esplin.
Dr. Tsai said he was excited about the robot’s potential to restore reefs damaged by rising sea temperatures. Ms. Jackel commented that mass coral bleaching events had occurred more regularly, which is why the team is trying to grow coral that will adapt and be more resilient to climate change.
There was a bottleneck in the overall process because it was done manually, and that is what CGRAS aimed to resolve. Mr Lamont said the current design of the robot prototype housed a high-resolution submersible camera with a macroscopic lens – basically a waterproof microscope – mounted at the end of a robotic arm.
The arm is wrapped up to prevent corrosion in the salt-water environment of the aquaculture facility, and mounted atop a mobile platform that can be moved manually and houses all of the computers. It was noted that although an ideal approach could be to build a fully autonomous robot that could drive itself through the aquaculture facility, that was not a cost-effective or necessary solution.
Dr. Tsai added; “Moving the robot manually between tanks only costs a fraction of the time compared to imaging, interpreting the images and counting the corals. Furthermore, the costs, challenges and risks of a fully-automated system for a still-developing coral conservation process are orders of magnitude more expensive than we currently have budget for.
“Instead, we aim to hit the sweet spot of what is achievable with a compliment of robotics and humans together to maximise operational and developmental costs for coral yield. By doing this, we can bring the camera to the corals repeatedly and accurately. The design is a prototype to capture images and serve as a tool for developing the software pipeline.”
Dr Tsai said the final design of the robot could look significantly different, but that for now the current design allows us to move forward with development as the scientists and researchers continue to develop and uncover the underlying biological process of mass coral aquaculture.
He also clarified that this program differs from the Coral Spawn and Larvae Imaging Camera Systems (CSLICS) or “nanny-cams” project, which were for the coral spawn when they were still eggs and embryos developing into coral larvae.
“This CGRAS project focuses on a later stage in coral development, where the coral larvae have settled onto the bottom and have started to grow into coral polyps.”
The team hopes that projects like CGRAS will prompt R&D into conservation aquaculture methods that can to help the Reef cope with increasing temperatures.
Visit the QUT website to read the original article or find out more.