Showcase your capabilities
If you design, build or supply MEMS Accelerometers, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.



MEMS accelerometers, miniaturized sensors that detect acceleration along one or more axes, are revolutionizing marine technologies. In remotely operated vehicles (ROVs), autonomous underwater vehicles (AUVs), and autonomous surface vessels (ASVs), these compact accelerometer sensors enable accurate motion tracking, precise control, and integration into inertial navigation systems (INS). This page examines how MEMS accelerometers function, their key features and types, and their applications across maritime platforms, providing insight for engineers, system designers, and technical decision-makers in the offshore, defense, and scientific exploration sectors.
Read the Technology Overview






Rugged Industrial & Inertial-Grade MEMS Accelerometers for Marine & Offshore Applications
High-Performance MEMS-Based Inertial Sensing Solutions for Marine, Offshore & Underwater Applications

High-Performance MEMS Gyroscopes, Accelerometers & Inertial Systems for Marine & Maritime Applications
If you design, build or supply MEMS Accelerometers, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.

MEMS accelerometers are compact sensors that detect acceleration. In ROVs, AUVs, and ASVs, they enable precise motion tracking, control, and integration with inertial navigation systems (INS).
MEMS accelerometers utilize micro-machined structures, such as cantilevers or proof masses, etched into silicon wafers to detect acceleration forces. When an assembly experiences motion or gravitational forces, the proof mass moves slightly. This displacement is converted into an electrical signal via capacitive, piezoresistive, or piezoelectric transduction.

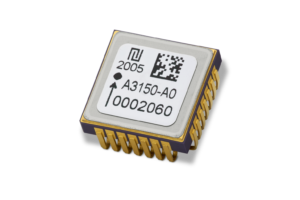
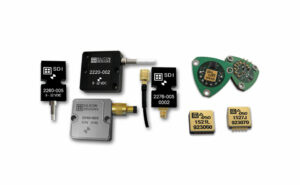
1522 MEMS Accelerometer by SDI.
Because of their micro-scale construction, MEMS accelerometers offer key advantages over traditional accelerometers:
Within a maritime context, MEMS accelerometer sensors are often combined with MEMS gyroscopes to form MEMS inertial measurement units (IMUs). When integrated with inertial navigation systems (INS), these components enable continuous position and attitude estimation even when GPS is unavailable.
There are several MEMS accelerometer types worth knowing:
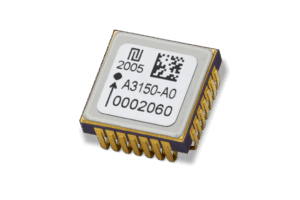
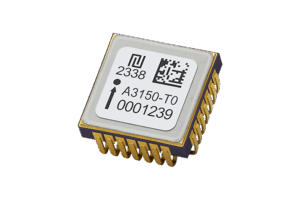
AXO®315 Accelerometer by Tronics Microsystems.
An INS combines accelerometers and gyroscopes within an IMU, feeding motion data into algorithms that compute position, velocity, and orientation over time. INS has these roles:
MEMS accelerometers significantly enhance INS performance by providing cost-effective and reliable acceleration sensing. High-end MEMS units exhibit low bias drift, high resolution, and stable temperature response, traits necessary for precise maritime navigation.
Beyond vehicle-based systems, MEMS accelerometers are being widely adopted across a range of other maritime applications. Their small form factor, reliability, and responsiveness make them well-suited to monitoring, control, and diagnostics in both static and dynamic marine environments. Key use cases include:
Important factors when selecting include:
Emerging developments include:
MEMS accelerometers are indispensable in marine technology. They serve critical roles in ROVs, AUVs, and ASVs, enabling precise control, motion compensation, and integration in inertial navigation systems. Beyond vehicle navigation, they support structural and condition monitoring, buoy systems, and wave-glider platforms. MEMS accelerometers offer a balance of performance, size, cost, and power consumption that is unmatched by traditional sensors, and ongoing advancements continue to expand their relevance in marine and maritime applications.
 Searching Companies & Products
Searching Companies & Products

 Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.
Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.