


Dynautics has launched the Phantom 2, a new modular Unmanned Underwater Vehicle (UUV) designed to meet industry demands for efficiency and versatility in offshore tasks.
The Phantom 2 is an evolution of Dynautics’ successful Phantom 1, which was originally built for the US Navy. The modular design of the new UUV allows it to accommodate different battery options for increased endurance and range, as well as various payloads, facilitated by the company’s proven autopilot technology. The design is rated for depths up to 100 meters, providing access to littoral areas and significant portions of the continental shelf.
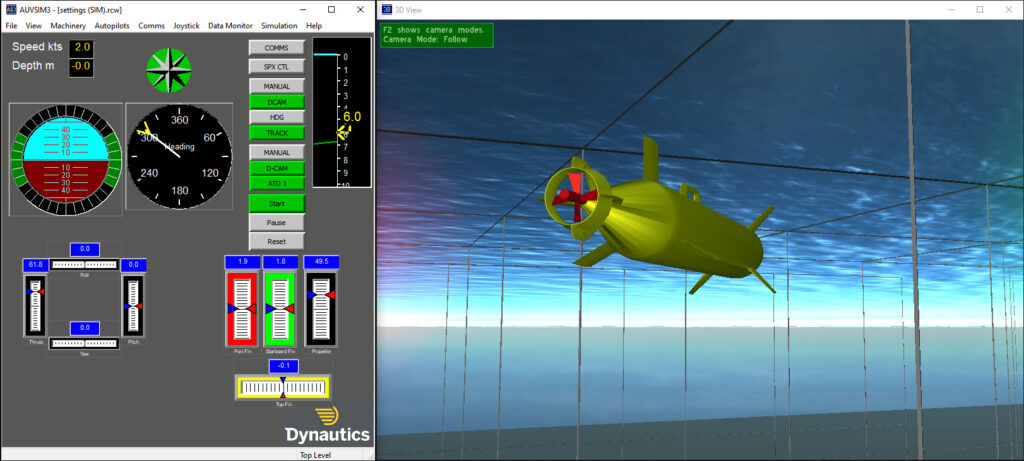
To ensure performance, development included the optimization of vehicle efficiency using 3D models, digital twin creation, and simulation to reduce risk and cost. Furthermore, extensive Failure Mode and Effect Analysis (FMEA) was undertaken on the subsystems and overall design to enhance reliability.
Testing for the Phantom 2 demonstrated a cruising speed of 4 knots, with 12 hours of endurance at that pace while operating at shallow depths. The vehicle also exhibited exceptional surface manoeuvrability. Importantly, repeated missions were completed without the need for interim recovery, which validates the modular design and communication systems for improved operational efficiency.
Dynautics CEO Henry Robinson stated, “Phantom 2 is proving to be a versatile platform ready for commercial, scientific and security applications. We fully intend to further extend the capabilities of our modular and reliable AUVs so that they are well positioned to support a sustainable future for subsea exploration.”
UUVs are being increasingly deployed across various sectors, including military and defense operations, oil and gas exploration, scientific research, environmental monitoring, and aquaculture. They are often utilized as a low-impact, non-invasive, and cost-effective method to support the decarbonization of offshore and subsea tasks. The next phase of testing for the Phantom 2 is already underway and involves integrating a side scan sonar.