
Autonomous Underwater Vehicles (AUV)
Discover cutting-edge solutions from 9 leading global suppliers
During a test mission, an NOC ocean robot accidentally discovered an underwater camera system, believed to be among the earliest attempts to capture the Loch Ness monster on film.
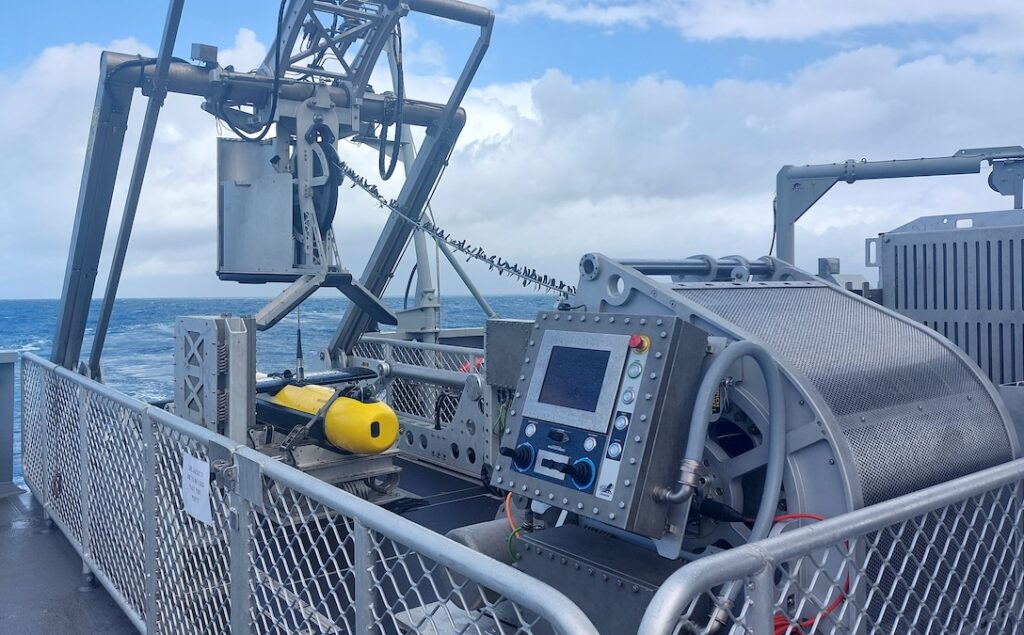
NOC has been developing advanced autonomous vehicles for more than 30 years. Its latest robotics trials in Loch Ness involve testing two Autosub vehicles, one that’s used for mapping seabed habitats and another used for long range autonomous operations.

Available to the UK’s marine science community, these vehicles can reach depths of 6,000 m, collecting ocean data to address key questions about marine health and its role in supporting our planet
NOC’s Autosub underwater vehicle, popularly known as Boaty McBoatface, found the camera when part of its mooring became entangled in the vehicle’s propeller.
It is believed that the camera, discovered around 180 m deep in the loch, had been placed in the water in 1970, by Professor Roy Mackal, of the Loch Ness Investigation Bureau and the University of Chicago.
Although submerged in the 23-mile-long loch for 55 years, the camera remained in good condition, and an NOC engineer was able to develop the film, though no sign of the loch’s famous inhabitant appeared.
Adrian Shine, who set up The Loch Ness Project in the mid-1970s to investigate Loch Ness and its world-famous inhabitant, helped to identify the camera and says it was one of six deployed by Professor Mackal, with three of them lost in a gale that same year, “It was an ingenious camera trap consisting of a clockwork Instamatic camera with an inbuilt flash cube, enabling four pictures to be taken when a bait line was taken. It is remarkable that the housing has kept the camera dry for the past 55 years, lying around 180 m deep in Loch Ness.“
Sam Smith, ALR operations engineer, from NOC’s Marine Autonomous Robotics Systems (MARS) group, said, “At 230 m deep, Loch Ness is an ideal location to testing our robotics, their sensors and systems, before they’re deployed in the deep ocean to help answer the big questions we have. While this wasn’t a find we expected to make, but we’re happy that this piece of Nessie hunting history can be shared and perhaps at least the mystery of who left it in the loch can be solved.”

The film, camera, and housing have been handed to The Loch Ness Centre in Drumnadrochit, near the discovery site, for display as part of Loch Ness investigation history.
Smith added, “The ocean covers 70% of the surface of the earth, but there’s still so much we don’t know about it, the life in it, how both interact with our atmosphere and how climate change will impact those relationships.
“With our robots we’re also helping to map and monitor marine life to understand how our actions, such as offshore renewable energy development, fishing and deep-sea mining change habitats and ecosystems.
“So the work we do here, developing the technology to help us better understand the ocean, is critical. We’re grateful for the hospitality and support that local companies like Caley Marina and Gordon Menzies have provided over the years that means we get to do this work here.
“They were also instrumental in supporting the recovery of the underwater vehicle and the camera system, with Gordon skippering the Cluaran Dubh, and Steve Davren from Caley Marina skippering the Kelpie, with help also from an underwater locator device from subsea technology firm Sonardyne.”