
Dynautics, a leader in intelligent control systems for uncrewed marine operations, has enabled thousands of miles of autonomous navigation through its advanced vehicle management technologies. The company develops and supplies resilient marine autopilots, remote control systems, power modules, and communication solutions for unmanned surface vehicles (USVs).
In this exclusive interview, Dr. Henry Robinson, CEO of Dynautics, discusses the company’s journey in developing vehicle control systems, tailoring solutions for diverse marine missions, and how AI and autonomy are influencing the future of ocean technology.
Dynautics has developed custom technologies for a wide range of ocean science and uncrewed maritime applications. Can you highlight real-world scenarios where your tailored systems made a significant impact, and how your team adjusts to unique requirements across different sectors?
Wave-powered platforms like AutoNaut’s USVs can operate for weeks on end, thousands of miles offshore, without requiring fuel or batteries for propulsion. While speeds are modest, their endurance makes them ideal for persistent ocean observation.

Dynautics Power Management Systems
AutoNaut needed a compact, low-power control system with satellite communication; VSAT antennas were too large for the small craft. This meant operating with a small, bandwidth-limited antenna and managing the data link carefully. We also integrated power management with remote switching and protection features. The system has since operated reliably over long-distance missions well beyond line of sight.
Another example is HydroSurv, which offers 2.8 to 6 metre electric and hybrid USVs for environmental and hydrographic surveys. Here, battery management was key, we had to synchronise charging schedules with mission phases that demanded low acoustic output, meaning the generator had to remain off during data collection.
For defence and industrial users, we’ve built dual-redundant control architectures, enabling seamless switching between autopilots via subsystem bus control.
Additionally, we’ve enhanced vessel manoeuvrability. One 12-metre craft originally had a turning circle of around 150 metres. After implementing our control solution, it could pivot within its own length. Another project involved programming vessels to follow curved trajectories, rather than standard straight-line navigation, as required for certain survey operations.
Dynautics has a long-standing reputation for delivering dependable marine autopilots and control systems. How have these technologies developed over time, and what major innovations have influenced their evolution?
From the beginning, Dynautics has built its technology on foundational principles: an understanding of vehicle control physics, physics-based simulations, and a modular control architecture for flexibility.
We’ve introduced application-specific modules for more specialised functions, for instance, managing the interaction between RPM, gearbox, reversing bucket, and steering nozzle in waterjet propulsion systems.
Much of this logic has been embedded in separate control modules linked by a bus architecture. The result is a system that is scalable across a wide spectrum of uncrewed vessels and autonomous underwater vehicles (AUVs).
The Phantom UUV is built for autonomous subsea operations. Can you talk about recent developments that enhance its performance in demanding underwater conditions?
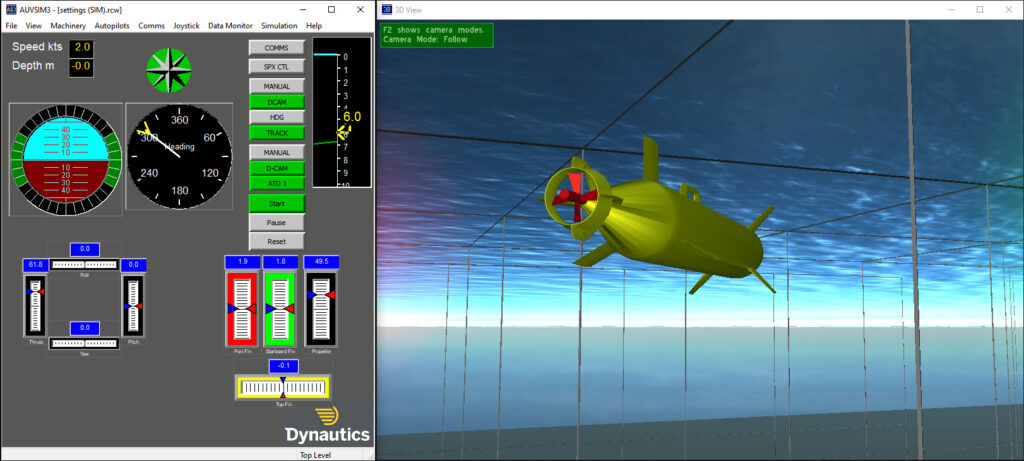
The original Phantom was developed and taken to sea trials in just 100 days, thanks to our deep understanding of vehicle dynamics and our simulation platform, AUV Sim. This allowed us to test both control algorithms and physical design elements ahead of deployment.
Phantom UUV (Uncrewed Underwater Vehicle)
The versatility of MicroSPECTRE meant that the autopilot required very little modification to meet mission needs.
Phantom 2 builds on that success. It is approximately twice the size in each dimension and has about eight times the mass and displacement of its predecessor.
Its first manoeuvring trials took place in March 2025 with excellent performance. The platform retains the same highly modular design: propulsion and steering are housed in the aft section, while the mid and front sections can be easily adapted to carry different payloads, all within a 315 mm diameter.
Dynautics plays an active role in the development of marine autonomy frameworks. What has your involvement been in shaping autonomy standards, particularly through your work on the UK Marine Autonomous Surface Ships Code of Practice?
The UK’s Marine Autonomous Systems Regulatory Working Group (MASRWG) has been a key forum for over a decade, bringing together leading figures in the sector to guide the responsible development of USV operations.
Dynautics has been involved since 2014, and our participation has offered valuable insight into industry direction while giving us the opportunity to contribute to shaping the Code of Practice for Marine Autonomous Surface Ships.
Looking ahead, what trends or emerging technologies do you see influencing the next generation of unmanned and autonomous marine systems?
True autonomy for UUVs and AUVs is still some distance away. However, mission-specific pseudo-autonomous decision-making can be pre-programmed into our systems based on customer-defined parameters. These parameters can be adjusted remotely or refined over time, and in some cases, systems can build a knowledge base to support more intelligent behaviour.
We expect that increased integration of AI within customer mission control systems will further drive the shift toward real autonomy. For example, if a UUV detects an area of interest in survey data, an autonomous system could modify its route and generate a new search pattern, something a pre-programmed system would not typically do. This enables more efficient and valuable data collection.
Collision avoidance in congested or restricted waterways remains a key challenge.
Technologies such as radar, AIS, forward-looking sonar, and optical sensors all support obstacle detection. However, ensuring dependable performance in all conditions, night and day, rain or fog, calm or rough seas, is still an evolving task.
Even straightforward issues, like keeping optical surfaces clean, are non-trivial. In harbours or near busy shipping lanes, systems must also account for complex vessel behaviour and environmental factors such as tides. Although COLREGs define navigational conduct, not all vessels follow them reliably, introducing uncertainty.
Because of this complexity, completely autonomous systems must reach an extremely high bar for safe operation, any single failure could have serious consequences. Therefore, we expect human supervision to remain essential for USVs for years to come. In the meantime, solutions will continue to rely on supervised autonomy, with enhanced situational awareness for remote operators.
More broadly, the growing focus on the blue economy is driving innovation. There is increasing uptake of hybrid and electric propulsion systems, and this trend is likely to continue. Dynautics has long supported a wide range of propulsion types, including fully electric drives, and our control systems are designed to support the growing autonomy needs essential for sustainable ocean operations.
Thank you for sharing these valuable insights into Dynautics’ work in marine autonomy. We look forward to seeing the company’s continued contributions to the future of unmanned marine systems.