SBG Systems has released a detailed performance evaluation of its Inertial Navigation Systems (INS) in scenarios where GNSS is unavailable, a growing concern for marine and underwater operations due to increasing GNSS jamming in coastal regions. Find out more >>
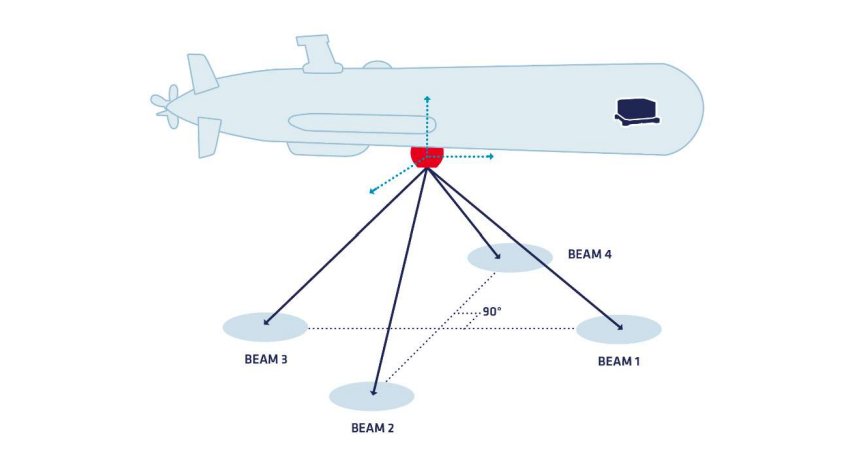
The test campaign focused on dead reckoning performance using SBG’s Ellipse-D (entry-level), Ekinox Micro (mid-range), and Apogee-D (high-end) systems. Each was tested with and without Doppler Velocity Log (DVL) aiding, using Teledyne’s Pathfinder DVL, to simulate GNSS-denied conditions. Tests were conducted in Cagnes-sur-Mer, France, using SBG’s Qinertia post-processing software to simulate GNSS outages without physically disconnecting antennas.
Key findings highlight the critical role of IMU quality and aiding sensors. In pure inertial mode, higher-grade systems like the Apogee-D maintained accuracy significantly longer than lower-tier units. DVL integration dramatically enhanced dead reckoning performance across all systems, with even the Ellipse showing impressive results when aided by magnetometers.
Sensor warm-up time was also shown to be vital. Short warm-up periods led to increased drift over time, emphasizing the importance of proper initialization before entering GNSS-denied environments.
The results confirm that effective navigation in GNSS-denied marine and submarine applications depends on a combination of IMU grade, aiding sensors such as DVL, robust heading estimation, and sufficient system warm-up.