Sistemas avanzados de sonar para navegación y oceanografía
El sonar frontal permite a los buques y vehículos submarinos detectar y evitar obstáculos en tiempo real. A diferencia de los sistemas de consumo utilizados para la pesca recreativa, los sistemas de sonar de visión directa utilizados en oceanografía, navegación comercial y vehículos autónomos están diseñados para obtener imágenes precisas, detección de largo alcance y una integración perfecta con los sistemas de navegación submarina y planificación de misiones.
Estos sofisticados sistemas de sonar utilizan phased arrays, beamforming e imágenes volumétricas para proporcionar un conocimiento de la situación en entornos que van desde las aguas costeras hasta las profundidades marinas. Esta página ofrece una visión en profundidad de las tecnologías de sonar orientado hacia delante, sus aplicaciones, capacidades y en qué se diferencian de los productos de sonar orientado hacia delante más sencillos utilizados en los mercados de consumo.
Si diseñas, construyes o suministras Sónar de Visión Avanzada, Crea un perfil para mostrar tus capacidades y conectar con visitantes que tengan una necesidad real de tus soluciones.
Sistemas avanzados de sonar para navegación y oceanografía
Resumen por
Sarah Simpson
Actualizado:
Los sistemas de sonar prospectivo (FLS) son herramientas de imagen acústica que proyectan activamente ondas sonoras hacia delante desde la proa de un buque o la parte delantera de un vehículo submarino. Los ecos devueltos se procesan para generar visualizaciones en tiempo real del terreno submarino, los peligros y los objetos situados por delante de la dirección de desplazamiento de la plataforma. Estos sistemas ofrecen una visión crítica de la navegación y el conocimiento de la situación, especialmente en entornos de baja visibilidad en los que fallan los sistemas ópticos, como aguas turbias, operaciones nocturnas o bajo el hielo.
A diferencia del sonar tradicional de barrido lateral o hacia abajo, el sonar de barrido hacia delante proporciona datos procesables por delante de la plataforma, lo que ayuda a tomar decisiones proactivas en la navegación submarina. Resulta especialmente útil para evitar peligros sumergidos, planificar rutas seguras en aguas desconocidas y mejorar la detección de obstáculos en misiones autónomas o pilotadas a distancia.
Tecnologías de la imagen y tipos de sistemas
Existen varias clases de sonares de visión delantera, diferenciadas por sus capacidades de imagen y tecnologías de transductores:
Sonar de visión delantera 2D
Argos 500, sonda de visión delantera de FarSounder
El sonar de visión delantera 2D crea cortes planares de la columna de agua y del fondo marino, ofreciendo visualizaciones directas de los obstáculos en una única sección transversal.
Estos sistemas son habituales en aplicaciones en las que priman la sencillez y la claridad, como la evitación básica de obstáculos en vehículos teledirigidos (ROV) y embarcaciones de reconocimiento.
Sonar 3D de visión frontal
También conocido como sonar de imágenes volumétricas, produce representaciones ricas y espacialmente detalladas del entorno submarino. Estos sistemas son ideales para cartografiar estructuras sumergidas, detectar cambios en el fondo marino y realizar tareas de navegación complejas que se benefician de un conocimiento espacial completo.
Sistemas de sonar phased array
Estos sistemas utilizan la formación de haces controlada electrónicamente para dirigir los haces del sonar sin movimiento mecánico. Esto permite obtener imágenes rápidas y de alta resolución en una amplia gama de sectores, mejorando la separación de objetivos y reduciendo la latencia. Los sonares phased array suelen ser los preferidos para aplicaciones que requieren altas frecuencias de actualización, como el control de misión adaptativo en navegación autónoma.
Sistemas multihaz y monohaz
Representan otra distinción fundamental. Los sonares multihaz ofrecen una cobertura de gran amplitud y una cartografía detallada del terreno. En cambio, el sonar monohaz tiende a ser más sencillo y rentable, por lo que resulta muy adecuado para tareas de corto alcance e instalaciones en espacios limitados.
Sonar de barrido mecánico
Los sonares de barrido mecánico utilizan transductores giratorios para construir imágenes línea a línea, lo que puede proporcionar detalles de alta resolución, pero a expensas de velocidades de actualización más lentas y una mayor complejidad mecánica.
Estos sistemas pueden disponer de mecanismos de inclinación para ajustar el ángulo de barrido vertical, una característica crucial para las plataformas que operan a distintas profundidades o que se dirigen a objetivos tanto de campo cercano como de largo alcance.
Capacidades clave del sonar prospectivo
Un sólido sistema de sonar prospectivo ofrece múltiples capacidades críticas para las operaciones marítimas:
Evitación de obstáculos
Al detectar rocas sumergidas, restos de naufragios, oleoductos y otros obstáculos en tiempo real, el sonar de visión delantera permite estrategias proactivas de evasión, especialmente en aguas turbias o desconocidas.
Cartografía del lecho y el fondo marinos
Combinado con sistemas de prospección autónomos o tripulados, el sonar de visión directa permite generar modelos batimétricos detallados que se utilizan en oceanografía, vigilancia medioambiental y proyectos de infraestructuras de los fondos marinos.
Búsqueda y recuperación
La capacidad de detectar y clasificar objetos en condiciones submarinas difíciles hace que estos sistemas sean indispensables en operaciones de búsqueda y salvamento (SAR), investigaciones forenses y recuperación de activos.
Planificación de rutas submarinas
Cuando se navega en entornos desconocidos o dinámicos, el sonar de exploración ayuda a planificar rutas óptimas que eviten los peligros y minimicen el tiempo de tránsito.
Conocimiento de la situación
Para los operadores de AUVs, ROVs y USVs, el sonar de visión delantera proporciona una visibilidad hacia delante esencial, apoyando misiones más seguras, especialmente durante la navegación autónoma.
Aplicaciones reales del sonar prospectivo
Oceanografía y vigilancia medioambiental
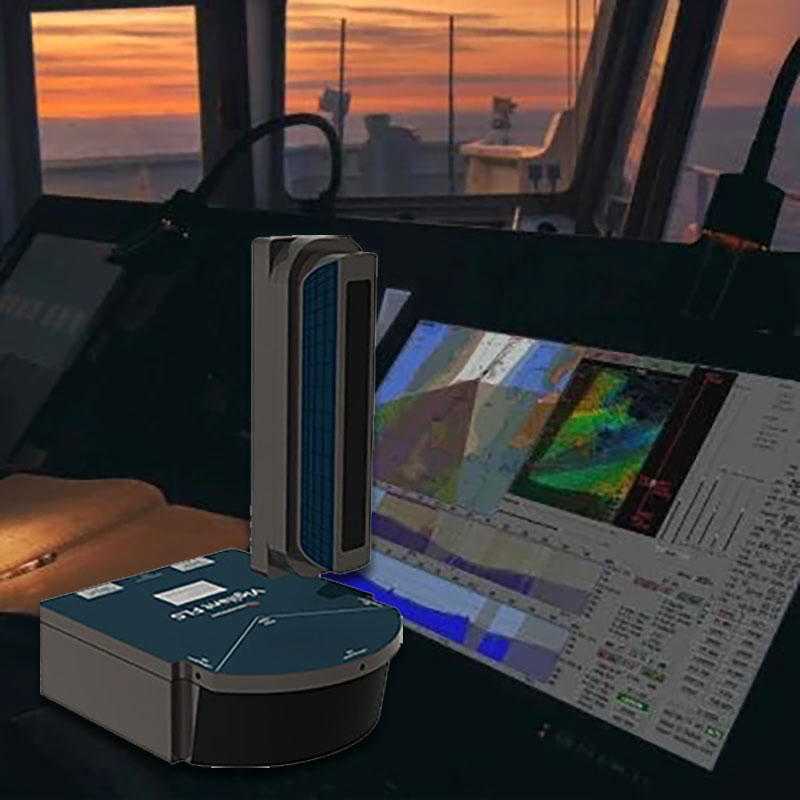
NORBIT FLS (Forward Looking Sonar) de NORBIT Subsea
El sonar de visión frontal desempeña un papel fundamental en las misiones científicas oceánicas. Montados en buques de investigación, AUVs o cuerpos remolcados, estos sistemas facilitan la cartografía precisa del fondo marino y la detección de características bentónicas.
Las imágenes volumétricas por sonar permiten a los investigadores modelizar los ecosistemas y seguir los cambios medioambientales a lo largo del tiempo. Los sistemas de banda ancha ofrecen la alta resolución necesaria para estudiar en detalle el transporte de sedimentos, las estructuras de los arrecifes y los hábitats bentónicos.
Buques comerciales y seguridad de la navegación
Los grandes buques comerciales operan con frecuencia en puertos muy transitados, canales estrechos o condiciones de baja visibilidad. El sonar frontal mejora la seguridad de la navegación al identificar obstáculos sumergidos y permitir ajustar la ruta en tiempo real. En los transbordadores y buques de carga, la prevención de peligros mediante sonar complementa al radar y al GPS, aportando un aspecto submarino al conjunto de herramientas de conocimiento de la situación.
AUV, ROV y USV
Las plataformas autónomas y operadas por control remoto dependen en gran medida del sonar de visión delantera para mantener una navegación segura. Estos vehículos suelen realizar operaciones cerca de infraestructuras, dentro de oleoductos o en terrenos difíciles del fondo marino. Los sistemas de sonar de imagen ayudan a evitar colisiones y a realizar maniobras de precisión durante las misiones de inspección, mantenimiento y recogida de datos.
Pesca e investigación marina
Aunque el sonar de visión directa no se utiliza principalmente para la detección de peces, los sistemas avanzados pueden ayudar a estudiar el comportamiento de la vida marina y la distribución de las poblaciones en aguas abiertas o cerca de estructuras. Cuando se integran con imágenes volumétricas, contribuyen a la investigación pesquera no invasiva y a la evaluación de hábitats.
Operaciones de búsqueda y recuperación
El sonar de exploración es fundamental en las operaciones de búsqueda y recuperación, ya que permite detectar aviones derribados, buques hundidos o equipos perdidos. Su capacidad para operar en aguas turbias y de alta turbidez, donde los sistemas ópticos fallan, es esencial para la rápida identificación y recuperación de objetos submarinos.
Integración técnica y factores de rendimiento
Para funcionar eficazmente sobre el terreno, los sistemas de sonar de visión delantera deben integrarse con diversas tecnologías embarcadas y específicas de la misión:
Sistemas de datos y control de misión: Los datos en tiempo real del sonar suelen visualizarse a través de interfaces de software específicas y pueden exportarse a plataformas GIS para su análisis posterior a la misión.
Plataformas de navegación autónomas: En los AUV y USV, los datos del sonar alimentan directamente los sistemas de control que toman las decisiones de navegación de forma autónoma. Los algoritmos de evitación de peligros dependen de la precisión y puntualidad de los datos del sonar.
Limitaciones de potencia y espacio: Las embarcaciones de investigación y los vehículos submarinos deben equilibrar la demanda de potencia de los sistemas de sonar con la resistencia general de la misión. La resistencia hidrodinámica y el espacio ocupado por los equipos son consideraciones importantes durante la integración de la plataforma.
Los diseñadores de sistemas también deben tener en cuenta el tipo de señal (banda ancha frente a banda estrecha), la anchura del haz, el alcance de exploración y la profundidad de funcionamiento. Los sonares de banda ancha proporcionan imágenes detalladas a corta distancia, ideales para la inspección y la recuperación, mientras que los sistemas de banda estrecha destacan en la detección a larga distancia.
Integración y estándares de datos
Los sistemas de sonda profesionales con visión de futuro a menudo necesitan comunicarse con una serie de dispositivos electrónicos de a bordo, como GPS, pilotos automáticos, sondas de profundidad y pantallas multifunción. Para apoyar esta interoperabilidad, muchas unidades de sonar comerciales y de investigación incorporan soporte para protocolos de datos marinos estandarizados, como NMEA 0183 y NMEA 2000.
Mientras que NMEA 0183 es más sencillo y utiliza la comunicación en serie, NMEA 2000 ofrece una red basada en CAN más robusta y de alta velocidad, ideal para las embarcaciones digitales modernas. La integración a través de estos estándares permite que los sistemas de navegación autónomos utilicen directamente las alertas de obstáculos derivadas del sonar o las registren para el análisis de misiones, lo que hace que la conformidad con NMEA sea una consideración importante para las plataformas tripuladas y no tripuladas.
En qué se diferencia el sonar prospectivo del sonar prospectivo de consumo
Existe una confusión frecuente entre los sonares profesionales orientados hacia delante y las unidades de sonar “orientadas hacia delante” que se comercializan para los pescadores. Aunque ambos utilizan una terminología similar, sus prestaciones y ámbitos de aplicación son muy diferentes:
Características
FLS profesional
Buscador de peces de consumo
Uso principal:
Navegación, cartografía y evitación de obstáculos
Detección de peces
Alcance
100-1000+ metros
Normalmente menos de 50 metros
Imágenes:
2D/3D volumétrica, multihaz
Imágenes 2D simplificadas
Despliegue:
ROVs, AUVs, barcos de prospección, embarcaciones comerciales
Embarcaciones de recreo
Formación de haces:
Phased array, multihaz
Haz único o doble
Integración:
Sistemas autónomos, control de misión
Independiente con chartplotter
Los sistemas de consumo, como las sondas de pesca de barrido frontal, se limitan a profundidades recreativas y carecen de la resolución y las capacidades de procesamiento de señales necesarias para misiones profesionales. No pueden resolver infraestructuras sumergidas, modelar el terreno en 3D ni interactuar con protocolos de navegación autónoma.
El sonar de visión directa es un componente vital de la navegación submarina moderna y de las operaciones de reconocimiento. Con capacidades que van mucho más allá de las de los sistemas de consumo, el FLS proporciona datos procesables para la navegación segura, la cartografía del fondo marino y la planificación de misiones en una amplia gama de dominios marítimos.
Ya sea para la investigación oceanográfica, la navegación comercial o la exploración basada en AUV, el sonar de visión de futuro sigue siendo esencial para comprender y operar en entornos submarinos. A medida que la tecnología sigue evolucionando, podemos esperar una integración, resolución y autonomía aún mayores de estos potentes sistemas.
Los sistemas de sonar de visión directa proporcionan imágenes de alta resolución en tiempo real del terreno y los objetos del subsuelo situados directamente delante de un buque. Diseñados para su despliegue en buques de investigación, vehículos autónomos de superficie (ASV) y embarcaciones tripuladas que operan en entornos complejos, estos sonares mejoran el conocimiento de la situación proporcionando una referencia visual dinámica del dominio submarino. Sus haces acústicos orientados hacia delante facilitan la detección temprana de obstáculos submarinos, características topográficas y peligros potenciales, aumentando significativamente la seguridad operativa y la eficacia en la toma de decisiones.
Sonar orientado hacia delante frente a ecosondas orientadas hacia abajo
Estos sistemas se diferencian de las tradicionales ecosondas orientadas hacia abajo en que transmiten señales acústicas por delante del buque en lugar de por debajo. A medida que aumenta la demanda de navegación precisa en aguas poco profundas, turbias o desconocidas, el sonar de barrido hacia delante se ha hecho indispensable para los científicos marinos, los topógrafos hidrográficos y los operadores comerciales. Variantes como el sonar de barrido frontal y el sonar de imagen frontal utilizan transductores de barrido mecánico o phased array para obtener perfiles detallados del fondo marino, las estructuras sumergidas y los objetos móviles, lo que permite una planificación proactiva de la ruta y un control adaptativo de la misión.
Aplicaciones clave en ciencias oceánicas y operaciones marinas
Los mejores modelos de sonar prospectivo ofrecen frecuencias de actualización ultrarrápidas y una separación de objetivos mejorada, lo que resulta crucial para entornos marinos dinámicos en los que son esenciales tiempos de respuesta rápidos. Las aplicaciones abarcan desde la investigación pesquera -en la que el sonar orientado hacia delante para la pesca ayuda a identificar bancos de peces por delante del buque- hasta misiones de búsqueda y recuperación que requieren la confirmación visual de objetivos submarinos. Estas herramientas también son fundamentales para la navegación autónoma, ya que ayudan a los ASV a evitar peligros en tiempo real y reducen el riesgo de encallamientos y colisiones.
Opciones de montaje y configuraciones de despliegue
Las configuraciones de montaje desempeñan un papel fundamental en la eficacia del sonar. Las monturas de los sonares orientados hacia delante están diseñadas para ofrecer estabilidad y una resistencia hidrodinámica mínima, tanto si están integradas en el casco del buque como si se despliegan mediante pértigas ajustables. Algunos sistemas incorporan mecanismos de inclinación para ajustar el ángulo, lo que permite a los operadores optimizar la cobertura del haz en función de los requisitos de la misión y de las condiciones del mar. La adaptabilidad de estos soportes es especialmente importante en los despliegues modulares para expediciones de investigación o cuando se instalan en plataformas existentes.
Cómo funciona el sonar orientado hacia delante
Para entender cómo funciona un sonar orientado hacia delante, hay que conocer sus tecnologías de formación de haces. Utilizando transmisiones de banda estrecha o ancha, el transductor emite impulsos acústicos en un plano horizontal o vertical ligeramente inclinado. Los ecos se reciben y procesan para producir una imagen acústica en tiempo real, normalmente representada en un arco en forma de abanico con distintos rangos de campo de visión y profundidad. Los sistemas avanzados pueden integrar funciones de sonar 3D de visión directa, que ofrecen imágenes volumétricas que proporcionan contexto espacial y diferenciación de objetos en tres dimensiones.
Sónar de visión directa frente a LiveScope: Principales diferencias
Aunque las comparaciones entre el sonar de visión directa y el LiveScope son habituales en los casos de uso recreativo y semicomercial, es importante señalar que la mayoría de las tecnologías de sonar de visión directa para aplicaciones científicas o profesionales están optimizadas para la navegación a escala de embarcación y la detección de objetos, en lugar de centrarse exclusivamente en la pesca. Estos sistemas dan prioridad al alcance, la fidelidad y la capacidad de configuración frente a la delicadeza de las imágenes de consumo.
Precios típicos de los sonares de visión delantera
Los precios de los sonares de exploración frontal pueden variar mucho en función de las capacidades, el uso previsto y los requisitos de integración del sistema. Un sonar de exploración frontal básico para embarcaciones puede costar desde unos pocos miles de euros, mientras que las soluciones avanzadas con imágenes 3D de alta resolución y funciones de registro de datos pueden costar bastante más. Los precios de los sonares de barrido delantero reflejan no sólo las especificaciones del hardware, sino también las características del software, incluidas las herramientas de visualización en tiempo real, las capacidades de grabación y la compatibilidad con los sistemas de navegación y GIS.
Para los buques dedicados a la prospección, la exploración y la vigilancia del medio ambiente, el sonar de exploración frontal se ha convertido en una piedra angular de sus operaciones. La tecnología sigue avanzando rápidamente, con innovaciones en el procesamiento de señales, funcionamiento multifrecuencia y diseño de transductores compactos que impulsan una adopción más amplia. A medida que las misiones científicas oceánicas exigen cada vez más información precisa y orientada al futuro, los sistemas de sonar de visión frontal están estableciendo nuevos estándares de seguridad marítima, fidelidad de los datos y autonomía de navegación.