
Multibeam Echosounders
Discover cutting-edge solutions from 10 leading global suppliers
As part of the NA152 expedition, the Ocean Exploration Trust (OET) and partners have successfully completed a backscatter calibration of Exploration Vessel (E/V) Nautilus’ multibeam sonar.
Carried out at reference sites offshore of Oʻahu and outside Hawaiʻi state waters, the backscatter calibration enables acquisition of high-quality imagery of the relative hardness of the seafloor as a ship traverses variable terrain and water depths.
This information is critical for understanding marine habitats, interpreting marine geology, and informing siting of offshore infrastructure placement, e.g., communications cables.
OET is coordinating with the National Oceanic and Atmospheric Administration (NOAA) to use the same calibration site as other NOAA ships to improve methods to collect more consistent data from different vessels.
Sonar backscatter measures how much sound is reflected from the seafloor and provides valuable insights into the distribution of hard or soft habitats (i.e. rock versus mud, for instance). The backscatter calibration process involves gathering multibeam sonar data over sets of reciprocal tracks at different sonar operating modes and adjusting computer processing routines to deliver comparable imagery.
Calibration lines used during the exercise were located at depths of 650 and 3,000 meters (~2,100 and 9,800 feet). NOAA Ship Rainier previously established the calibration lines used by E/V Nautilus and the same lines will also be surveyed by NOAA Ship Okeanos Explorer to enhance the comparability of backscatter data among different ships.
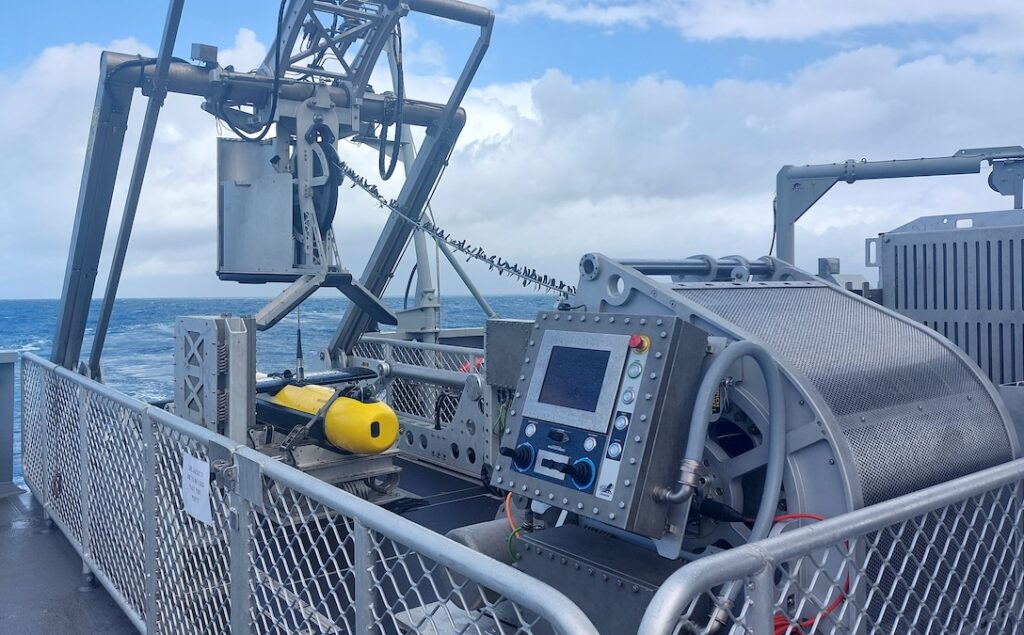
E/V Nautilus is equipped with a multibeam sonar that simultaneously collects depth and backscatter data to enable the production of high-quality seafloor maps at depths to 7,000 meters (23,000 feet), which are essential precursors to identifying features of interest and more targeted exploration and research. During the calibration exercise, Nautilus collected backscatter normalization data at various sonar mode settings.
Multibeam sonar data from E/V Nautilus also contributes directly to the Seabed 2030 Initiative, an international collaborative project combining all bathymetric data to create a comprehensive ocean floor map. Since 2012, E/V Nautilus has mapped over 870,000 square kilometers (336,000 square miles) of the seafloor in the Atlantic, Gulf of Mexico, Caribbean Sea, and Pacific Ocean.
Many other vessels have also contributed to this global mapping effort, yet to date less than 25 percent of the world’s ocean has been charted at high resolutions. Filling the remaining data gaps will require collaboration and coordination amongst many different partners, and the recent calibration exercise is an important step towards this global goal.
“E/V Nautilus is part of a larger effort to systematically map and explore the global ocean, along with several other vessels. Using comparable and standardized methodologies across different platforms is critical to the success of this larger effort, and this upcoming calibration exercise is a good example of this,” says Dr. Daniel Wagner, OET Chief Scientist. “Multiple research ships are conducting a similar calibration exercise at the same location, thereby providing valuable information to cross-calibrate systems.”
“Most of our ocean has not yet been explored or studied,” says Dr. Aurora Elmore, the Cooperative Institute Manager for NOAA Ocean Exploration. “By working closely with partners like the OECI and OET, we are working to accelerate the pace of ocean exploration using new and improved technologies.”
“These measurements enable OET to balance the acoustic backscatter intensity levels between pings, sectors, and depth modes,” says Dr. Derek Sowers, OET Mapping Operations Manager. “The backscatter correction will be applied to all new data collected by E/V Nautilus moving forward, yielding improved backscatter imagery of the seafloor.”