

Proveedores
Añade tu empresa
Teledyne Marine
Instrumentos, sensores y tecnologías de alto rendimiento para la exploración y supervisión de entornos submarinos.
Platinum Partner

Open Ocean Robotics
USV fiables alimentados con energía solar para la adquisición de datos oceanográficos y marítimos en tiempo real
Gold Partner

CHC Navigation
Soluciones profesionales de levantamientos marinos para la recopilación ultraeficiente de datos hidrográficos, batimétricos e hidrológicos
Gold Partner

Maritime Robotics
Tecnologías innovadoras de autonomía y embarcaciones no tripuladas para operaciones marítimas
Gold Partner

SatLab Geosolutions
Soluciones de vanguardia para topografía, posicionamiento y detección para aplicaciones hidrográficas y oceanográficas
Gold Partner
AGISTAR
Soluciones robóticas y controladas a distancia para la recogida de residuos, operaciones de rescate y recopilación de datos acuáticos
Silver Partner
Demuestra tus capacidades.
Si diseñas, construyes o suministras Vehículos autónomos de superficie, crea un perfil para mostrar tus capacidades en esta página.
Vehículos autónomos de superficie (ASV)

Introducción a los vehículos autónomos de superficie
Los vehículos autónomos de superficie (ASV) son embarcaciones no tripuladas y de navegación autónoma que prestan apoyo a las operaciones marítimas en los sectores científico, industrial y de defensa. Los ASV, que operan completamente sobre la superficie del agua sin la necesidad de un operador humano directo, son capaces de ejecutar una amplia gama de misiones, desde embarcaciones compactas de inspección costera de baja velocidad hasta grandes plataformas oceánicas de alta resistencia. Su arquitectura está concebida fundamentalmente para ofrecer una autonomía fiable, y suelen contar con propulsión redundante, sofisticadas suites integradas de navegación y control, y módulos inteligentes de gestión de la carga útil.

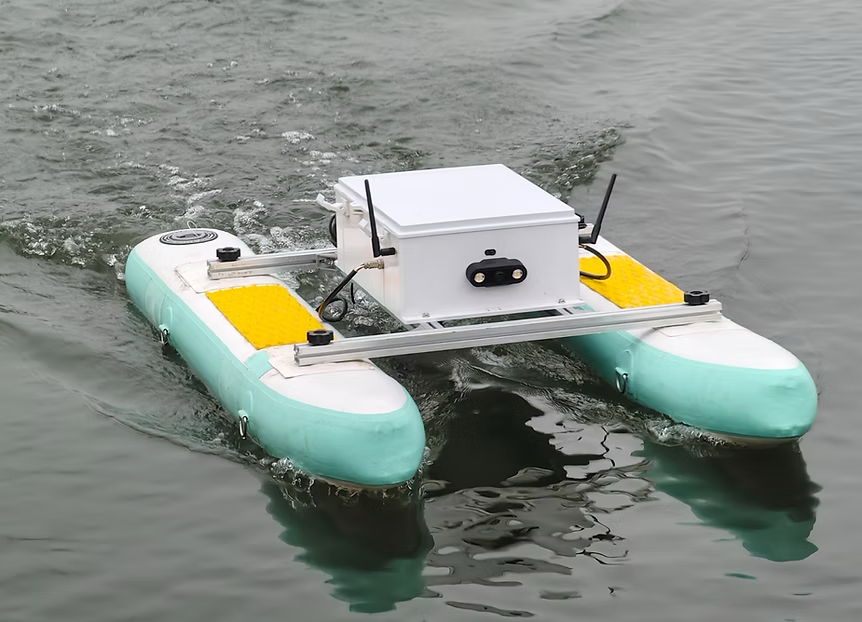
BX-USV II, un vehículo autónomo de superficie, de AGISTAR
Al automatizar las tareas rutinarias y peligrosas, los ASV amplían significativamente el alcance humano en el ámbito marítimo, proporcionando constantemente datos fiables y de alta resolución de entornos que, de otro modo, serían demasiado costosos, peligrosos o complejos desde el punto de vista logístico para que los buques con tripulación pudieran acceder a ellos con eficacia.
Aplicaciones de los vehículos autónomos de superficie
El papel de los vehículos autónomos de superficie en los dominios marítimos modernos se está ampliando rápidamente, consolidando su posición como activos críticos en múltiples industrias de alto valor.
Ciencias oceánicas y vigilancia medioambiental
Para los científicos oceánicos, los ASV funcionan como plataformas móviles y persistentes de recopilación de datos. Son esenciales para la vigilancia casi continua del medio ambiente, proporcionando información crítica que complementa a la perfección los datos procedentes de satélites y activos submarinos. Esto incluye el seguimiento de procesos climáticos, la cartografía de la dinámica oceánica y la vigilancia de ecosistemas sensibles, aportando datos fundamentales para modelos medioambientales detallados.
Defensa, seguridad y operaciones navales
Las fuerzas navales utilizan cada vez más los ASV como centinelas autónomos. Sus funciones abarcan la vigilancia y el reconocimiento persistentes, el apoyo hidrográfico y las operaciones de contramedidas antiminas de gran eficacia. Patrullan de forma autónoma zonas costeras o portuarias de alto valor, compartiendo datos de situación en tiempo real a través de redes seguras. Además, actúan como multiplicadores de fuerza, ampliando la cobertura de sensores y el alcance operativo de los medios navales tripulados, al tiempo que minimizan el riesgo para el personal en entornos peligrosos o disputados.
Inspección energética e industrial en alta mar
En los exigentes sectores de alta mar, como el del petróleo, el gas y las energías renovables, los ASV son fundamentales para la inspección, la gestión de activos estructurales y el cumplimiento de la normativa medioambiental. Reducen drásticamente la necesidad de costosas embarcaciones de apoyo con tripulación al operar de forma autónoma en zonas peligrosas. Equipados con sistemas especializados de sonar e imagen, inspeccionan la infraestructura submarina, controlan las fugas y evalúan la integridad estructural de plataformas, tuberías y cimientos de parques eólicos.
Ventajas de los ASV frente a los buques con tripulación
Los vehículos autónomos de superficie ofrecen un cambio significativo en la seguridad, eficiencia y economía de las operaciones marítimas.
-

HydroBoat 1200, un buque autónomo de superficie, de SatLab Geosolutions
Mayor seguridad: La ventaja más significativa es la retirada del personal de misiones peligrosas, como las operaciones durante fenómenos meteorológicos severos o en zonas contaminadas por artefactos o peligros químicos.
- Resistencia superior: Su tamaño a menudo compacto y su propulsión altamente eficiente (incluidos los sistemas solares o híbridos) permiten un funcionamiento considerablemente prolongado con una dependencia mínima o nula de combustible o mantenimiento físico durante periodos que se extienden a semanas o meses.
- Costes reducidos: Los costes operativos se reducen drásticamente al eliminar la necesidad de grandes tripulaciones, sistemas de soporte vital y logística asociada que requieren los buques de inspección tradicionales.
- Precisión y repetibilidad: Los ASV están diseñados para mantener una posición excepcionalmente precisa y ejecutar patrones de prospección altamente repetibles con una precisión submétrica. Esta capacidad es crucial para lograr productos de datos consistentes y de alta calidad, especialmente en levantamientos hidrográficos.
Principales sistemas y tecnologías de los ASV
El funcionamiento fiable de un vehículo autónomo de superficie depende de un sofisticado conjunto de componentes de hardware y software integrados.

CHCNAV Apache 6 USV, un buque de reconocimiento autónomo, de CHC Navigation
Sistemas de navegación y guiado
Una navegación fiable es el requisito fundamental para una autonomía segura y eficaz de los ASV, lo que requiere un enfoque multisensor. Estos sistemas fusionan continuamente datos de múltiples fuentes redundantes para mantener un posicionamiento de alta integridad, combinando normalmente sistemas globales de navegación por satélite (GNSS) para las fijaciones primarias con sistemas de navegación inercial (INS) para mantener un posicionamiento preciso durante períodos de degradación u obstrucción de la señal GNSS. Además, los registros de velocidad Doppler (DVL) miden la velocidad relativa al fondo marino o a la columna de agua, lo que aumenta significativamente la precisión de los cálculos de navegación a estima.
Los avanzados algoritmos de fusión de sensores sintetizan continuamente estos datos combinados, lo que permite una navegación a estima precisa, un mantenimiento exacto de la posición y una corrección del rumbo en tiempo real, esencial para las maniobras dinámicas. Además, los sistemas integrados de radar y LiDAR son herramientas de percepción esenciales que proporcionan sólidas capacidades de detección y evitación de obstáculos, lo que permite al ASV adaptar su ruta con seguridad y en estricto cumplimiento del Reglamento Internacional para Prevenir las Colisiones en el Mar (COLREG).
Cargas útiles de percepción y detección medioambiental
La versatilidad de un ASV viene definida en gran medida por su capacidad de carga útil, que se elige en función del objetivo de la misión. Para la navegación básica y el conocimiento de la situación, utilizan radares, LiDAR y cámaras electro-ópticas/infrarrojas (EO/IR). Para misiones oceanográficas o hidrográficas específicas, el conjunto de sensores puede incluir:
- Sensores CTD (Conductividad, Temperatura, Profundidad).
- ADCP (perfiladores acústicos de corriente Doppler).
- Fluorómetros y sensores químicos para la calidad del agua.
- Ecosondas multihaz y sonares de barrido lateralpara cartografiar el fondo marino.
Los datos de estos instrumentos se introducen a menudo en los procesadores de misión de a bordo para un control de calidad inmediato, lo que permite una planificación de misión adaptable y en tiempo real en respuesta a las condiciones ambientales o los objetivos observados.
Sistemas de propulsión y potencia
Los diseños de propulsión de los ASV son diversos y van desde los tradicionales motores diésel y fueraborda hasta configuraciones totalmente eléctricas o híbridas. Para equilibrar una mayor autonomía con una reducción de las señales acústicas y de emisiones, muchas plataformas modernas emplean configuraciones diésel-eléctricas. Una tecnología clave para las misiones persistentes y de larga duración es la integración de fuentes de energía renovables (como los paneles solares, la propulsión asistida por el viento o incluso las pilas de combustible de hidrógeno), lo que permite realizar operaciones de exploración de baja potencia que pueden prolongarse durante muchos meses sin repostar combustible externo.
Autonomía y software de control
El software de autonomía es la capa de inteligencia, que dicta meticulosamente cómo el ASV percibe su entorno, planifica sus tareas y ejecuta acciones con una supervisión humana mínima. Los modos de control varían significativamente, desde el control remoto y supervisor hasta la sofisticada toma de decisiones totalmente autónoma que aprovecha algoritmos basados en IA para escenarios complejos. Los requisitos funcionales básicos se ejecutan a través de módulos de software especializados, incluida la planificación eficaz de misiones, la navegación adaptativa precisa por puntos de ruta y las capacidades dinámicas de evitación de obstáculos y reasignación de tareas basadas en la información recibida de los sensores en tiempo real.
El cumplimiento de las normas COLREG es una característica esencial y no negociable de la lógica de control, que gestiona de forma autónoma el movimiento y las interacciones del buque para garantizar un funcionamiento seguro y el cumplimiento de la normativa cuando navega cerca del tráfico marítimo tripulado. El uso creciente de modelos de aprendizaje automático mejora aún más la navegación predictiva, optimiza la adaptación a las olas y facilita los comportamientos cooperativos dentro de las flotas autónomas multivehículo.
Integración en el ecosistema marítimo autónomo
Los vehículos autónomos de superficie modernos rara vez son sistemas aislados. Cada vez se despliegan más como parte de flotas autónomas multidominio, que operan a la perfección junto a vehículos submarinos autónomos (AUV) y vehículos aéreos no tripulados (UAV). Estos sistemas integrados comparten datos de misión crítica y coordinan sus acciones a través de marcos de mando comunes conectados en red. Esto permite la adquisición simultánea de datos en la superficie, el subsuelo y los dominios aéreos. La sinergia que proporcionan el software de control unificado y las arquitecturas avanzadas de fusión de datos está haciendo avanzar rápidamente a la industria hacia el concepto de un entorno operativo de “océano digital” verdaderamente integral y conectado en red.
Tecnologías emergentes en los buques de investigación autónomos
Las capacidades de los buques autónomos de investigación marítima avanzan continuamente gracias a las tecnologías más avanzadas.
IA, aprendizaje automático y gemelos digitales
La inteligencia artificial (IA) está elevando rápidamente el rendimiento de los ASV. Los algoritmos de aprendizaje automático se utilizan para analizar datos de sensores complejos para una rápida clasificación de objetivos, predecir el movimiento y el comportamiento de los buques en estados dinámicos del mar y optimizar las rutas para ahorrar energía. Las tecnologías de gemelos digitales, que crean réplicas virtuales de alta fidelidad del ASV y su entorno operativo, se están convirtiendo en indispensables para fines como el mantenimiento predictivo, el ensayo riguroso de misiones y la simulación del comportamiento a largo plazo del sistema en condiciones diversas y extremas.
Fuentes de energía sostenibles
El impulso mundial hacia una autonomía sostenible está acelerando el desarrollo de vehículos aéreos no tripulados propulsados por energías renovables. Las plataformas que utilizan propulsión solar y eólica pueden alcanzar una autonomía teóricamente indefinida para tareas de observación de baja potencia. Para plataformas más grandes, de mayor potencia y largo alcance, las pilas de combustible de hidrógeno ofrecen una solución energética limpia y de alta densidad. Estos avances no sólo reducen la huella medioambiental de las operaciones, sino que también permiten realizar campañas de vigilancia oceánica persistentes, a largo plazo y sin emisiones.



