

Proveedores
Añade tu empresa
SBG Systems
Soluciones avanzadas de navegación inercial, movimiento y posicionamiento para aplicaciones marinas
Platinum Partner
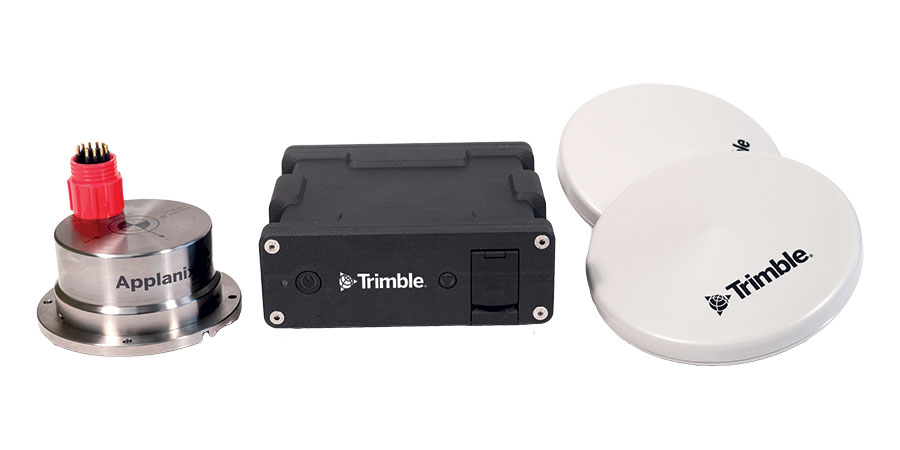
Trimble Applanix
Sistemas de posicionamiento, orientación y navegación de alta precisión para aplicaciones marinas y marítimas
Platinum Partner

Advanced Navigation
Sensores inerciales y sistemas de posicionamiento acústico de alta precisión para aplicaciones marinas, marítimas y de alta mar

Platinum Partner
Demuestra tus capacidades.
Si diseñas, construyes o suministras Posicionamiento submarino, crea un perfil para mostrar tus capacidades en esta página.
Sistemas de posicionamiento submarino para ROV, UUV y sumergibles

En entornos submarinos, la navegación precisa y el seguimiento exacto de la ubicación de los vehículos son fundamentales. Desde el seguimiento en tiempo real hasta las misiones autónomas de larga duración, las plataformas submarinas requieren datos de posicionamiento sólidos. Ya sea mediante señales acústicas, unidades de medición inercial (IMU) o localización y cartografía simultáneas (SLAM), estos sistemas ayudan a mantener la orientación, la conciencia espacial y registros precisos de la actividad de la misión.
Entre sus principales aplicaciones se encuentran los sistemas de posicionamiento submarino para uso militar, la navegación submarina para investigación científica y el posicionamiento de vehículos operados por control remoto (ROV) en el sector de la energía en alta mar. La navegación submarina fiable también permite la recopilación repetible de datos, el muestreo selectivo y la maniobra segura alrededor de estructuras submarinas.
Tipos de sistemas de posicionamiento submarino
Sistemas de posicionamiento acústico
Los sistemasde posicionamiento acústico son los métodos más utilizados para el seguimiento de vehículos submarinos. Determinan la ubicación basándose en el tiempo de viaje de las ondas sonoras a través del agua. Existen tres variantes principales, cada una adaptada a necesidades operativas diferentes.
USBL (línea de base ultracorta)
Sistemas USBL Easytrak de Applied Acoustics
Los sistemas USBL constan de un transceptor montado en un buque de superficie y un transpondedor fijado al vehículo submarino. El transceptor envía un ping acústico, recibe una respuesta y calcula la posición del vehículo basándose en la temporización de la señal y el ángulo de llegada.
Aplicaciones:
- Posicionamiento submarino de ROVs durante tareas de inspección, reparación y mantenimiento.
- Seguimiento dinámico de UUV y sumergibles
- Sistemas de posicionamiento submarino en operaciones costeras o a media profundidad
El USBL se valora por su rapidez de despliegue y movilidad, lo que lo hace ideal para misiones en las que una embarcación de apoyo sigue al vehículo.
LBL (línea de base larga)
El posicionamiento LBL utiliza un conjunto fijo de balizas acústicas colocadas en el fondo marino. El ROV o UUV interroga a estas balizas y calcula su posición triangulando los tiempos de retorno de las señales.
Aplicaciones:
- Construcción submarina de alta precisión y control de infraestructuras
- Cartografía e investigación científica en aguas profundas
- Sistemas de navegación submarina para operaciones autónomas
LBL proporciona una precisión centimétrica y un posicionamiento estable durante largos periodos, aunque requiere tiempo para desplegar la infraestructura del fondo marino.
SBL (línea de base corta)
Los sistemas SBL utilizan varios transductores montados en un buque o en un bastidor fijo. Estos transductores triangulan la posición de un transpondedor montado en un vehículo analizando la sincronización de las señales acústicas.
Aplicaciones:
- Prospecciones portuarias e investigación costera
- Seguimiento localizado de ROV y submarinistas
- Posicionamiento submarino de precisión media en proyectos cercanos a la costa
SBL ofrece un equilibrio entre sencillez, precisión y rapidez de instalación, lo que lo hace idóneo para el seguimiento submarino de medio alcance.
Sistemas de navegación inercial (INS)
Las unidades INS calculan la posición, velocidad y orientación procesando los datos de una unidad de medición inercial (IMU) a bordo, que incluye giroscopios y acelerómetros para medir el movimiento y la rotación. Mientras que la IMU proporciona los datos brutos, el INS utiliza algoritmos para calcular la información de navegación a lo largo del tiempo. Dado que los sistemas de navegación inercial pueden sufrir desviaciones debidas a errores de los sensores, a menudo se integran con referencias externas, como sistemas de posicionamiento acústico o GNSS (GNSS/INS), para mejorar la precisión y corregir los errores acumulados.
Aplicaciones:
- Cálculo del tiempo muerto para UUV en zonas sin GNSS.
- Inspección de tuberías a alta velocidad con ROV
- Navegación bajo hielo o en entornos con problemas acústicos
Los sistemas de navegación inercial se integran a menudo en sistemas híbridos, como GNSS/INS, para la navegación continua en segmentos de superficie y subsuperficie.
Localización y mapeo simultáneos (SLAM)
Los sistemas SLAM permiten a los vehículos submarinos crear un mapa en tiempo real de su entorno y estimar simultáneamente su posición dentro de ese mapa. Estos sistemas suelen utilizar sensores sonares o LiDAR submarinos, lo que permite la navegación en entornos desconocidos o dinámicos.
Aplicaciones:
- Navegación autónoma en terrenos submarinos inexplorados
- Sistemas de posicionamiento submarino en estructuras complejas
- Arqueología marina y misiones de vigilancia medioambiental
SLAM es ideal para misiones que requieren autonomía, especialmente en zonas donde no existe infraestructura externa o donde las actualizaciones en tiempo real son críticas.
Soluciones híbridas y referenciadas en superficie
Además de los sistemas autónomos, muchos vehículos submarinos utilizan soluciones híbridas que combinan datos GNSS, acústicos e inerciales. Un ejemplo es un sistema “GPS submarino”, en el que los datos GNSS de una boya o buque de superficie se transmiten a través de módems acústicos a un vehículo sumergido.
Aplicaciones:
- Operaciones dinámicas con ROV y AUV.
- Posicionamiento de embarcaciones y posicionamiento submarino con soporte fijo en superficie
- Posicionamiento de calidad topográfica en largas distancias
Estos sistemas garantizan un rendimiento constante de la navegación en entornos variables, respaldan misiones prolongadas y mejoran la conciencia espacial
Posicionamiento submarino para distintas plataformas
Sistemas de posicionamiento ROV
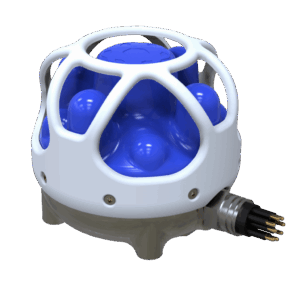
Subsonus, de Advanced Navigation
Los ROV que realizan tareas de inspección, construcción o científicas utilizan USBL o SBL para el posicionamiento en tiempo real, a menudo complementado con INS para el seguimiento del movimiento. Las aplicaciones incluyen la inspección de tuberías, la supervisión estructural y el muestreo medioambiental.
Navegación UUV y AUV
Las plataformas no tripuladas utilizan SLAM, GNSS/INS y sistemas acústicos para la navegación autónoma. Los sistemas INS permiten la navegación a estima, mientras que los sistemas LBL o los relés de superficie actualizan la posición cuando es necesario.
Sistemas de posicionamiento submarino
Los sumergibles tripulados y los submarinos militares utilizan LBL, INS y SLAM para la navegación sigilosa. Pueden incorporarse técnicas de navegación geomagnética y giroscópica para la redundancia y la corrección de la deriva.
Misiones científicas y medioambientales
Los científicos que realizan prospecciones bentónicas o estudios de hábitat necesitan una localización precisa. Los sistemas GPS submarinos y de LBL permiten cartografiar, recoger muestras y realizar seguimientos a largo plazo.
Construcción y energía en alta mar
Las soluciones LBL e INS ofrecen la precisión necesaria para la instalación de infraestructuras submarinas. El posicionamiento preciso de ROV permite la inspección de soldaduras, la alineación de bridas y la generación de informes en tiempo real
Selección del sistema de posicionamiento submarino adecuado
Un sistema de posicionamiento submarino es crucial para permitir una navegación segura y precisa en entornos sin GNSS. El posicionamiento acústico, que incluye USBL, LBL y SBL, proporciona un seguimiento versátil y preciso para una amplia gama de aplicaciones submarinas. Los sistemas inerciales ofrecen autonomía y resistencia, mientras que el SLAM permite la navegación en entornos desconocidos. Las soluciones híbridas mejoran aún más la fiabilidad combinando múltiples fuentes de datos.
Tanto si gestiona un vehículo operado por control remoto (ROV) en un proyecto de construcción como si despliega un vehículo submarino (UUV) para cartografiar el fondo marino o guía un submarino de investigación, la selección de la tecnología de posicionamiento submarino adecuada garantiza la eficacia operativa, el éxito de la misión y la integridad de los datos.



