Systèmes de sonar à balayage frontal pour la navigation et l'océanographie
Le sonar à balayage frontal permet aux navires et aux véhicules sous-marins de détecter et d'éviter les obstacles en temps réel. Contrairement aux systèmes grand public utilisés pour la pêche récréative, les systèmes de sonar à balayage frontal utilisés en océanographie, dans le transport maritime commercial et dans les véhicules autonomes sont conçus pour offrir une imagerie précise, une détection à longue portée et une intégration transparente avec les systèmes de navigation sous-marine et de planification de missions.Ces systèmes sonars sophistiqués utilisent des réseaux phasés, la formation de faisceaux et l'imagerie volumétrique pour fournir une connaissance de la situation dans des environnements allant des eaux côtières aux fonds marins. Cette page présente en détail les technologies sonars à balayage vers l'avant, leurs applications, leurs capacités et leurs différences par rapport aux produits sonars à balayage vers l'avant plus simples utilisés sur les marchés grand public.
Si vous concevez, construisez ou fournissez Sondeur à balayage frontal, Créez un profil pour mettre en avant vos compétences et entrer en contact avec des visiteurs qui recherchent activement vos solutions.
Systèmes de sonar à balayage frontal pour la navigation et l'océanographie
Vue d'ensemble par
Sarah Simpson
Mise à jour:
Les systèmes de sonar avant (FLS) sont des outils d’imagerie acoustique qui projettent activement des ondes sonores vers l’avant depuis la proue d’un navire ou l’avant d’un véhicule sous-marin. Les échos renvoyés sont traités afin de générer des visualisations en temps réel du relief sous-marin, des dangers et des objets situés devant la direction de déplacement de la plate-forme. Ces systèmes offrent des informations essentielles pour la navigation et la connaissance de la situation, en particulier dans les environnements à faible visibilité où les systèmes optiques ne fonctionnent pas, tels que les eaux troubles, les opérations nocturnes ou sous la glace.
Contrairement aux sonars traditionnels à balayage vers le bas ou latéral, les sonars à balayage vers l’avant fournissent des données exploitables devant la plate-forme, ce qui facilite la prise de décisions proactives dans le cadre de la navigation sous-marine. Ils sont particulièrement utiles pour éviter les dangers submergés, planifier des itinéraires sûrs dans des eaux inexplorées et améliorer la détection des obstacles lors de missions autonomes ou pilotées à distance.
Technologies d’imagerie et types de systèmes
Il existe plusieurs catégories de sonars à balayage frontal, qui se distinguent par leurs capacités d’imagerie et leurs technologies de transducteurs :
Sonar à balayage frontal 2D
Systèmes de sonar à réseau phasé
Ces systèmes utilisent une formation de faisceaux contrôlée électroniquement pour orienter les faisceaux sonars sans mouvement mécanique. Cela permet une imagerie rapide et haute résolution sur un large éventail de secteurs, améliorant la séparation des cibles et réduisant la latence. Le sonar à réseau phasé est souvent préféré pour les applications qui nécessitent des taux de rafraîchissement élevés, telles que le contrôle adaptatif de mission dans la navigation autonome.
Systèmes multifaisceaux et monofaisceaux
Ils représentent une autre distinction fondamentale. Le sonar multifaisceaux à balayage vers l’avant offre une large couverture et des capacités de cartographie détaillée du terrain. En revanche, le sonar à faisceau unique est généralement plus simple et plus rentable, ce qui le rend bien adapté aux tâches à courte portée et aux installations dans des espaces limités.
Sonar à balayage mécanique
Les sonars à balayage mécanique utilisent des transducteurs rotatifs pour construire des images ligne par ligne, ce qui permet d’obtenir des détails en haute résolution, mais au détriment de taux de mise à jour plus lents et d’une complexité mécanique plus élevée.
Ces systèmes peuvent être équipés de mécanismes d’inclinaison permettant d’ajuster leur angle de balayage vertical, une caractéristique essentielle pour les plateformes opérant à des profondeurs variables ou ciblant à la fois des objectifs proches et lointains.
Principales capacités du sonar à balayage vers l’avant
Un système de sonar à balayage frontal robuste offre de multiples capacités essentielles aux opérations maritimes :
Évitement d’obstacles
En détectant en temps réel les rochers submergés, les épaves, les pipelines et autres obstacles, le sonar à balayage frontal permet de mettre en place des stratégies d’évitement proactives, en particulier dans les eaux encombrées ou inexplorées.
Cartographie des fonds marins
Associé à des systèmes de levés autonomes ou avec équipage, le sonar à balayage frontal permet de générer des modèles bathymétriques détaillés utilisés en océanographie, dans la surveillance environnementale et dans les projets d’infrastructure des fonds marins.
Recherche et récupération
La capacité à détecter et à classer des objets dans des conditions sous-marines difficiles rend ces systèmes indispensables dans les opérations de recherche et de sauvetage (SAR), les enquêtes médico-légales et la récupération d’actifs.
Planification d’itinéraires sous-marins
Lors de la navigation dans des environnements inconnus ou dynamiques, le sonar à balayage vers l’avant aide à planifier des itinéraires optimaux qui évitent les dangers tout en minimisant le temps de transit.
Connaissance de la situation
Pour les opérateurs d’AUV, de ROV et d’USV, le sonar à balayage frontal offre une visibilité vers l’avant essentielle, ce qui permet de mener des missions plus sûres, en particulier lors de la navigation autonome.
Applications concrètes du sonar à balayage frontal
Océanographie et surveillance environnementale
[caption id="attachment_21885" align="alignright" width="300"] NORBIT FLS (sonar à vision avant) de NORBIT Subsea
Le sonar à vision frontale joue un rôle central dans les missions océanographiques. Installés sur des navires de recherche, des AUV ou des engins remorqués, ces systèmes facilitent la cartographie précise des fonds marins et la détection des caractéristiques benthiques.
L’imagerie sonar volumétrique permet aux chercheurs de modéliser les écosystèmes et de suivre les changements environnementaux au fil du temps. Les systèmes à large bande offrent la haute résolution nécessaire pour étudier en détail le transport des sédiments, les structures récifales et les habitats benthiques.
Navires commerciaux et sécurité de la navigation
Les grands navires commerciaux opèrent fréquemment dans des ports très fréquentés, des chenaux étroits ou dans des conditions de faible visibilité. Le sonar avant améliore la sécurité de la navigation en identifiant les obstacles submergés et en permettant d’ajuster la route en temps réel. Sur les ferries et les cargos, les systèmes de prévention des risques basés sur le sonar complètent le radar et le GPS, ajoutant une dimension sous-marine à la panoplie d’outils de connaissance de la situation.
AUV, ROV et USV
Les plateformes autonomes et télécommandées dépendent fortement du sonar à balayage vers l’avant pour assurer une navigation sûre. Ces véhicules sont souvent chargés d’opérations à proximité d’infrastructures, à l’intérieur de pipelines ou sur des fonds marins difficiles. Les systèmes de sonar à imagerie permettent d’éviter les collisions et facilitent les manœuvres de précision lors des missions d’inspection, de maintenance et de collecte de données.
Pêche et recherche marine
Bien que le sonar à balayage frontal ne soit pas principalement utilisé pour la détection des poissons, les systèmes avancés peuvent aider à étudier le comportement de la vie marine et la répartition des populations en eaux libres ou à proximité de structures. Lorsqu’ils sont intégrés à l’imagerie volumétrique, ils contribuent à la recherche halieutique non invasive et à l’évaluation des habitats.
Opérations de recherche et de sauvetage
Le sonar à balayage frontal joue un rôle essentiel dans les opérations de recherche et de sauvetage, car il permet de détecter les avions accidentés, les navires coulés ou les équipements perdus. Sa capacité à fonctionner dans des eaux troubles et à forte turbidité, où les systèmes optiques échouent, est essentielle pour l’identification et la récupération rapides d’objets sous-marins.
Intégration technique et facteurs de performance
Pour fonctionner efficacement sur le terrain, les systèmes de sonar à balayage frontal doivent s’intégrer à diverses technologies embarquées et spécifiques à la mission :
Systèmes de données et contrôle de mission : les données en temps réel provenant du sonar sont souvent visualisées via des interfaces logicielles dédiées et peuvent être exportées vers des plateformes SIG pour une analyse post-mission.
Plateformes de navigation autonomes : sur les AUV et les USV, les données du sonar sont directement transmises aux systèmes de contrôle qui prennent des décisions de navigation de manière autonome. Les algorithmes d’évitement des dangers reposent sur des données sonar précises et en temps réel.
Contraintes d’alimentation et d’espace : les bateaux d’étude et les véhicules sous-marins doivent trouver un équilibre entre les besoins en énergie des systèmes sonars et l’autonomie globale de la mission. La traînée hydrodynamique et l’encombrement des équipements sont des facteurs importants à prendre en compte lors de l’intégration de la plateforme.
Les concepteurs de systèmes doivent également tenir compte du type de signal (large bande ou bande étroite), de la largeur du faisceau, de la portée de balayage et de la profondeur de fonctionnement. Les sonars à large bande fournissent des images détaillées à courte distance, idéales pour l’inspection et la récupération, tandis que les systèmes à bande étroite excellent dans la détection à longue distance.
Intégration et normes de données
Les systèmes sonars professionnels et avant-gardistes doivent souvent communiquer avec toute une gamme d’appareils électroniques embarqués, tels que des GPS, des pilotes automatiques, des sondeurs et des écrans multifonctions. Pour prendre en charge cette interopérabilité, de nombreux sonars commerciaux et de recherche intègrent la prise en charge de protocoles de données maritimes normalisés, tels que NMEA 0183 et NMEA 2000.
Alors que le protocole NMEA 0183 est plus simple et utilise une communication série, le protocole NMEA 2000 offre un réseau CAN plus robuste et plus rapide, idéal pour les navires numériques modernes. L’intégration via ces normes permet aux alertes d’obstacles dérivées du sonar d’être utilisées directement par les systèmes de navigation autonomes ou enregistrées pour l’analyse des missions, ce qui fait de la conformité NMEA un élément important à prendre en compte pour les plateformes avec ou sans équipage.
En quoi le sonar à vision avant diffère-t-il du sonar grand public à vision avant
Il existe souvent une confusion entre les sonars à balayage frontal professionnels et les sonars « à balayage frontal » commercialisés pour les pêcheurs. Bien que les deux utilisent une terminologie similaire, leurs performances et leurs domaines d’application sont très différents :
Caractéristique
FLS professionnel
Sondeur grand public
Utilisation principale :
Navigation, cartographie et évitement d’obstacles
Détection des poissons
Portée :
100–1000+ meters
Généralement moins de 50 mètres
Imagerie :
Volumétrique 2D/3D, multifaisceaux
Images 2D simplifiées
Déploiement :
ROV, AUV, bateaux d’étude, navires commerciaux
Bateaux de plaisance
Formation de faisceaux :
Réseau phasé, multifaisceaux
Faisceau unique ou double
Intégration :
Systèmes autonomes, contrôle de mission
Autonome avec traceur de cartes
Les systèmes grand public, tels que les sondeurs à balayage avant, sont limités aux profondeurs récréatives et ne disposent pas de la résolution et des capacités de traitement du signal nécessaires aux missions professionnelles. Ils ne peuvent pas détecter les infrastructures submergées, modéliser le terrain en 3D ou s’interfacer avec des protocoles de navigation autonomes.
Le sonar à balayage vers l’avant est un composant essentiel des opérations modernes de navigation et de levés sous-marins. Avec des capacités qui dépassent de loin celles des systèmes grand public, le FLS fournit des données exploitables pour la navigation en toute sécurité, la cartographie des fonds marins et la planification de missions dans un large éventail de domaines maritimes.
Qu’il s’agisse de soutenir la recherche océanographique, le transport maritime commercial ou l’exploration à l’aide d’AUV, le sonar à balayage frontal reste essentiel pour comprendre et opérer dans les environnements sous-marins. À mesure que la technologie continue d’évoluer, nous pouvons nous attendre à une intégration, une résolution et une autonomie encore plus grandes de la part de ces systèmes puissants.






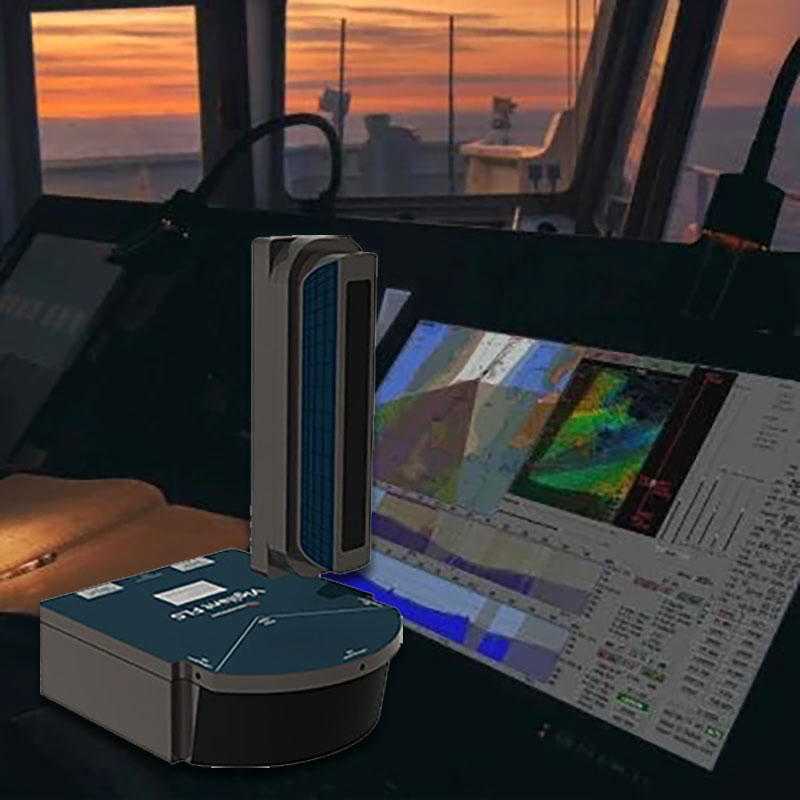









 NORBIT FLS (sonar à vision avant) de NORBIT Subsea
NORBIT FLS (sonar à vision avant) de NORBIT Subsea

