Sistemas de sonar de visão frontal para navegação e oceanografia
O sonar de visão frontal permite que embarcações e veículos subaquáticos detectem e evitem obstáculos em tempo real. Ao contrário dos sistemas voltados para o consumidor usados para localização recreativa de peixes, os sistemas de sonar de visão frontal usados em oceanografia, transporte comercial e veículos autônomos são projetados para imagens precisas, detecção de longo alcance e integração perfeita com sistemas de navegação subaquática e planejamento de missões.Estes sofisticados sistemas de sonar utilizam matrizes faseadas, formação de feixes e imagens volumétricas para proporcionar consciência situacional em ambientes que vão desde águas costeiras até terrenos de águas profundas. Esta página fornece uma visão aprofundada das tecnologias de sonar prospectivo, suas aplicações, capacidades e como elas diferem dos produtos de sonar prospectivo mais simples usados nos mercados de consumo.
Se você projeta, constrói ou fornece Sonar de visão frontal, Crie um perfil para mostrar as suas competências e entrar em contacto com visitantes que tenham uma necessidade real das suas soluções.
Sistemas de sonar de visão frontal para navegação e oceanografia
Visão geral por
Sarah Simpson
Atualizado:
Os sistemas de sonar prospectivo (FLS) são ferramentas de imagem acústica que projetam ativamente ondas sonoras para a frente a partir da proa de uma embarcação ou da frente de um veículo submarino. Os ecos de retorno são processados para gerar visualizações em tempo real do terreno subaquático, perigos e objetos localizados à frente da direção de viagem da plataforma. Esses sistemas oferecem informações críticas para a navegação e a consciência situacional, especialmente em ambientes de baixa visibilidade onde os sistemas óticos falham, como águas turvas, operações noturnas ou sob o gelo.
Ao contrário do sonar tradicional voltado para baixo ou de varredura lateral, o sonar voltado para a frente fornece dados acionáveis à frente da plataforma, apoiando a tomada de decisões proativas na navegação subaquática. É particularmente valioso para evitar perigos submersos, planejar rotas seguras em águas desconhecidas e melhorar a deteção de obstáculos durante missões autônomas ou pilotadas remotamente.
Tecnologias de imagem e tipos de sistemas
Existem várias classes de sonares de visão frontal, diferenciadas pelas suas capacidades de imagem e tecnologias de transdutores:
Sonar de visão frontal 2D
Sonda de visão frontal Argos 500 da FarSounder
O sonar de visão frontal 2D cria cortes planos da coluna de água e do fundo do mar à frente, oferecendo visualizações diretas dos obstáculos numa única secção transversal.
Estes sistemas são padrão em aplicações onde a simplicidade e a clareza são fundamentais, tais como a prevenção básica de obstáculos em veículos operados remotamente (ROVs) e barcos de pesquisa.
Sonar 3D prospectivo
Também conhecido como sonar de imagem volumétrica, produz representações ricas e espacialmente detalhadas do ambiente subaquático. Estes sistemas são ideais para mapear estruturas submersas, detetar alterações no fundo do mar e realizar tarefas de navegação complexas que beneficiam de uma perceção espacial completa.
Sistemas de sonar de matriz faseada
Estes sistemas utilizam a formação de feixes controlada eletronicamente para orientar os feixes do sonar sem movimento mecânico. Isto permite imagens rápidas e de alta resolução em uma ampla gama de setores, melhorando a separação de alvos e reduzindo a latência. O sonar de matriz faseada é frequentemente preferido para aplicações que requerem altas taxas de atualização, como o controlo adaptativo de missões em navegação autónoma.
Sistemas multifeixe e feixe único
Estes representam outra distinção fundamental. O sonar multifeixe de visão frontal oferece ampla cobertura e recursos detalhados de mapeamento do terreno. Em contrapartida, o sonar de feixe único tende a ser mais simples e econômico, tornando-o adequado para tarefas de curto alcance e instalações em espaços limitados.
Sonar com varredura mecânica
Os sonares com varredura mecânica usam transdutores rotativos para construir imagens linha por linha, o que pode fornecer detalhes de alta resolução, mas à custa de taxas de atualização mais lentas e maior complexidade mecânica.
Estes sistemas podem apresentar mecanismos de inclinação para ajustar o seu ângulo de varredura vertical, uma característica crucial para plataformas que operam em profundidades variáveis ou que visam objetivos de campo próximo e de longo alcance.
Principais capacidades do sonar de visão frontal
Um sistema robusto de sonar de visão frontal oferece vários recursos essenciais para operações marítimas:
Prevenção de obstáculos
Ao detetar rochas submersas, destroços, tubagens e outros obstáculos em tempo real, o sonar de visão frontal permite estratégias de prevenção proativas, especialmente em águas confusas ou não cartografadas.
Mapeamento do leito marinho e do fundo do mar
Combinado com sistemas de levantamento autónomos ou tripulados, o sonar prospectivo apoia a geração de modelos batimétricos detalhados utilizados em oceanografia, monitorização ambiental e projetos de infraestruturas do leito marinho.
Busca e recuperação
A capacidade de detetar e classificar objetos em condições subaquáticas desafiantes torna estes sistemas indispensáveis em operações de busca e salvamento (SAR), investigações forenses e recuperação de bens.
Planeamento de rotas subaquáticas
Ao navegar em ambientes desconhecidos ou dinâmicos, o sonar de visão frontal ajuda a planear trajetórias ideais que evitam perigos e minimizam o tempo de trânsito.
Consciência situacional
Para operadores de AUVs, ROVs e USVs, o sonar de visão frontal fornece visibilidade frontal essencial, apoiando missões mais seguras, especialmente durante a navegação autónoma.
Aplicações reais do sonar de visão frontal
Oceanografia e monitorização ambiental
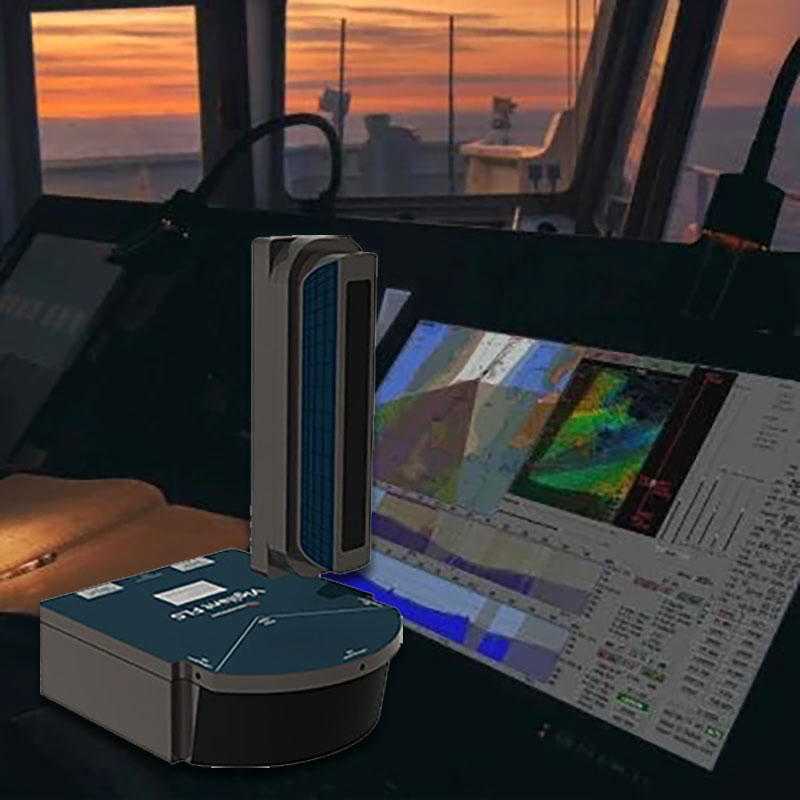
NORBIT FLS (Forward Looking Sonar) da NORBIT Subsea
O sonar prospectivo desempenha um papel fundamental nas missões científicas oceânicas. Montados em navios de pesquisa, AUVs ou corpos rebocados, esses sistemas facilitam o mapeamento preciso do fundo do mar e a detecção de características bentónicas.
As imagens volumétricas do sonar permitem aos investigadores modelar ecossistemas e acompanhar as alterações ambientais ao longo do tempo. Os sistemas de banda larga oferecem a alta resolução necessária para estudar em detalhe o transporte de sedimentos, as estruturas dos recifes e os habitats bentónicos.
Embarcações comerciais e segurança da navegação
Grandes navios comerciais operam frequentemente em portos movimentados, canais estreitos ou condições de baixa visibilidade. O sonar prospectivo melhora a segurança da navegação, identificando obstruções submersas e permitindo ajustes de rota em tempo real. Em balsas e navios de carga, a prevenção de riscos baseada em sonar complementa o radar e o GPS, fornecendo uma visão subaquática ao conjunto de ferramentas de consciência situacional.
AUVs, ROVs e USVs
As plataformas autónomas e operadas remotamente dependem fortemente do sonar prospectivo para manter uma navegação segura. Estes veículos são frequentemente encarregados de operações perto de infraestruturas, dentro de oleodutos ou em terrenos marinhos difíceis. Os sistemas de sonar de imagem ajudam a evitar colisões e apoiam manobras de precisão durante missões de inspeção, manutenção e recolha de dados.
Pesca e investigação marinha
Embora o sonar prospectivo não seja usado principalmente para a deteção de peixes, sistemas avançados podem ajudar no estudo do comportamento da vida marinha e da distribuição da população em águas abertas ou perto de estruturas. Quando integrados com imagens volumétricas, eles contribuem para pesquisas pesqueiras não invasivas e avaliações de habitat.
Operações de busca e recuperação
O sonar de visão frontal é fundamental em operações de busca e recuperação, permitindo a deteção de aeronaves acidentadas, embarcações afundadas ou equipamentos perdidos. A sua capacidade de operar em águas turvas e de alta turbidez, onde os sistemas óticos falham, é essencial para a rápida identificação e recuperação de objetos subaquáticos.
Integração técnica e fatores de desempenho
Para operar com eficácia no campo, os sistemas de sonar de visão frontal devem integrar-se a uma variedade de tecnologias embarcadas e específicas para a missão:
Sistemas de dados e controlo de missão: os dados em tempo real do sonar são frequentemente visualizados através de interfaces de software dedicadas e podem ser exportados para plataformas GIS para análise pós-missão.
Plataformas de navegação autónomas: em AUVs e USVs, os dados do sonar são enviados diretamente para sistemas de controlo que tomam decisões de navegação de forma autónoma. Os algoritmos de prevenção de riscos dependem de informações precisas e oportunas do sonar.
Restrições de energia e espaço: Os barcos de pesquisa e veículos subaquáticos devem equilibrar as demandas de energia dos sistemas de sonar com a resistência geral da missão. O arrasto hidrodinâmico e a pegada do equipamento são considerações importantes durante a integração da plataforma.
Os projetistas de sistemas também devem considerar o tipo de sinal (banda larga vs. banda estreita), largura do feixe, alcance de varredura e profundidade de operação. O sonar de banda larga fornece imagens detalhadas em curtas distâncias, ideal para inspeção e recuperação, enquanto os sistemas de banda estreita se destacam na detecção de longo alcance.
Integração e padrões de dados
Os sistemas de sonar profissionais e inovadores muitas vezes precisam de se comunicar com uma variedade de equipamentos eletrónicos a bordo, como GPS, pilotos automáticos, sondas de profundidade e visores multifuncionais. Para suportar essa interoperabilidade, muitas unidades de sonar comerciais e de investigação incorporam suporte para protocolos de dados marítimos padronizados, como NMEA 0183 e NMEA 2000.
Enquanto o NMEA 0183 é mais simples e utiliza comunicação serial, o NMEA 2000 oferece uma rede baseada em CAN mais robusta e de alta velocidade, ideal para embarcações digitais modernas. A integração por meio desses padrões permite que os alertas de obstáculos derivados do sonar sejam usados diretamente por sistemas de navegação autônomos ou registrados para análise de missão, tornando a conformidade com NMEA uma consideração importante para plataformas tripuladas e não tripuladas.
Como o sonar prospectivo difere do sonar voltado para a frente para consumidores
Existe uma confusão frequente entre o sonar profissional voltado para a frente e as unidades de sonar «voltadas para a frente» comercializadas para pescadores. Embora ambos possam usar terminologia semelhante, o seu desempenho e espaços de aplicação são muito diferentes:
Característica
FLS profissional
Localizador de peixes para consumidores
Utilização principal:
Navegação, mapeamento e prevenção de obstáculos
Detecção de peixes
Alcance:
100–1000+ meters
Normalmente menos de 50 metros
Imagem:
Volumétrica 2D/3D, multifeixe
Imagens 2D simplificadas
Implantação:
ROVs, AUVs, barcos de pesquisa, embarcações comerciais
Embarcações recreativas
Formação de feixes:
Phased array, multibeam
Feixe único ou duplo
Integração:
Sistemas autónomos, controlo de missão
Autónomo com plotter cartográfico
Os sistemas de consumo, como os localizadores de peixes com varredura frontal, são limitados a profundidades recreativas e não possuem a resolução e os recursos de processamento de sinal necessários para missões profissionais. Eles não conseguem resolver infraestruturas submersas, modelar terrenos em 3D ou interagir com protocolos de navegação autônoma.
O sonar de varredura frontal é um componente vital das operações modernas de navegação e levantamento subaquático. Com capacidades que vão muito além das dos sistemas de nível consumidor, o FLS fornece dados acionáveis para navegação segura, mapeamento do fundo do mar e planeamento de missões em uma ampla gama de domínios marítimos.
Seja para apoiar a investigação oceanográfica, o transporte comercial ou a exploração baseada em AUV, o sonar de visão frontal continua a ser essencial para compreender e operar em ambientes subaquáticos. À medida que a tecnologia continua a evoluir, podemos esperar ainda mais integração, resolução e autonomia destes poderosos sistemas.