Teledyne Marine has highlighted its collaboration with Zero USV in Plymouth, recently recognized as the United Kingdom’s marine autonomy hub, demonstrating how its sensing technologies integrate with Unmanned Surface Vehicles (USVs) to support ocean data collection.
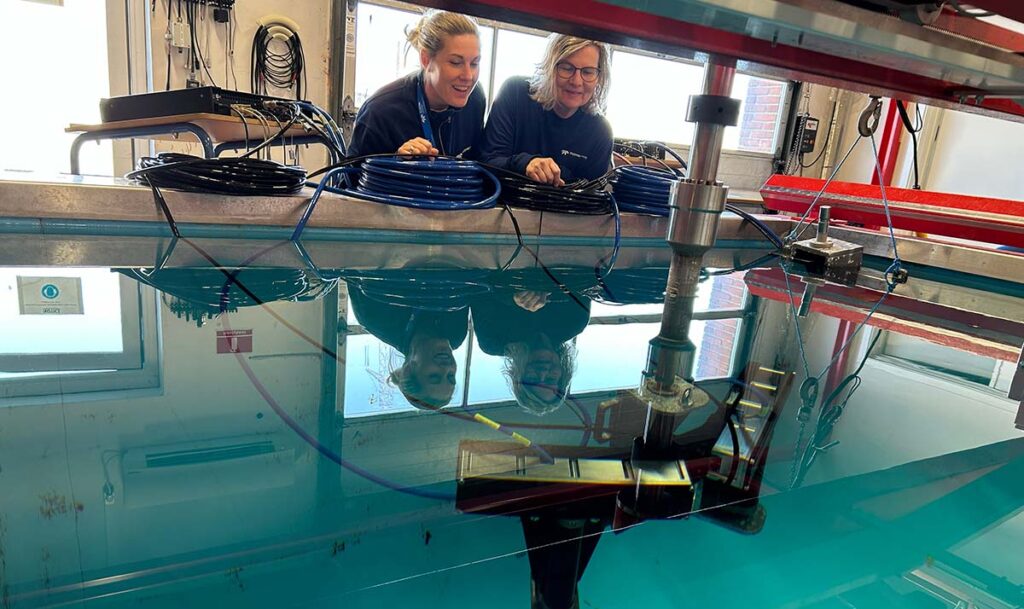
The activity took place at Turnchapel Wharf, the operational base for Zero USV, where Teledyne Marine instrumentation was deployed onboard an autonomous vessel to demonstrate integrated survey capabilities.
Filmed over two days in November 2025, the project captured operational activity onshore and on the water, illustrating the integration of Teledyne Marine technologies with an autonomous vessel platform and mission software.
Teledyne Marine Instrumentation
Teledyne Marine’s sensing technologies formed a central component of the demonstration, supporting hydrographic survey workflows conducted from an autonomous platform. Integrated with the vessel and mission software, the instrumentation enables survey data acquisition and real-time visualization during operations.
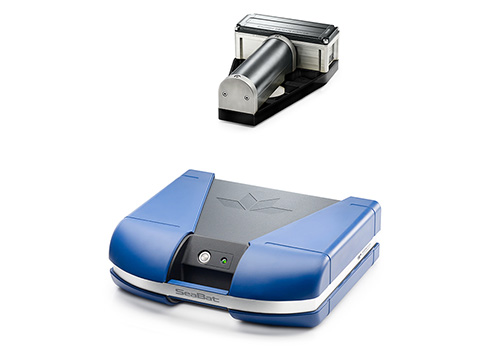
The SeaBat T-series multibeam sonar provides ultrahigh-resolution seabed mapping. Featuring autonomous sonar controls and integrated inertial navigation, the system delivers precise results without continuous operator intervention. The Teledyne Valeport SWiFT SVP (Sound Velocity Profiler) provides fast, high-accuracy sound velocity profiles, supporting real-time data correction and optimising multibeam sonar performance during survey operations.
Thermal cameras onboard the USV support situational awareness and safety, providing visibility in low-light or reduced-visibility conditions and enabling operators to maintain visual monitoring from the remote operations centre. Survey data is processed and visualised in PDS software, supporting streamlined workflows from acquisition through to final outputs.
Together, these technologies enable fully automated hydrographic workflows from acquisition through to real-time data visualisation.
OCEANUS12 ASV Platform
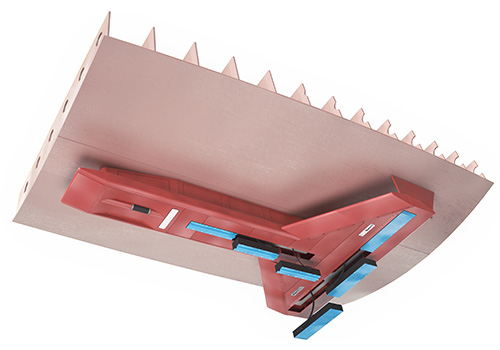
The demonstration utilized Zero USV’s OCEANUS12 class of USVs, engineered for endurance, stability, and reliability during extended missions. Developed by the team behind the Mayflower Autonomous Ship, the vessel supports missions of up to 20 days in shallow and deep-water environments. Powered by MarineAI’s autonomy software, it enables efficient mission execution with minimal human input.
Remote Monitoring
 The project also documented activity inside Zero USV’s Remote Operations Centre (ROC). Within this facility, operators monitor mission progress and observe live data feeds transmitted from the autonomous vessel.
The project also documented activity inside Zero USV’s Remote Operations Centre (ROC). Within this facility, operators monitor mission progress and observe live data feeds transmitted from the autonomous vessel.
Operational displays include sonar data, FLIR imagery, and mission information. The integration of Teledyne Marine instrumentation with MarineAI software enables real-time analytics and mission monitoring for remote operators.
This operational structure demonstrates how survey missions can be supervised from shore-based facilities without requiring personnel onboard the vessel.
Continued Development of Autonomous Marine Operations
The collaboration between Teledyne Marine and Zero USV reflects ongoing development of autonomous marine technologies across sectors including defense, marine science, hydrography, and offshore energy.
Following the Plymouth demonstration, the collaboration between the two organizations has continued. Teledyne Marine and Zero USV continue to examine additional opportunities for applying autonomous technologies to ocean data collection and survey operations.
For more information, visit the Teledyne Marine website.