Unidades de medição inercial para aplicações marítimas
As unidades de medição inercial (IMU) são amplamente utilizadas em aplicações marítimas, fornecendo dados precisos de orientação, aceleração e velocidade angular para aplicações que incluem navegação e posicionamento, estabilização de plataformas, posicionamento dinâmico (DP) e pesquisa oceanográfica.
Se você projeta, constrói ou fornece Unidades de medição inercial, Crie um perfil para mostrar as suas competências e entrar em contacto com visitantes que tenham uma necessidade real das suas soluções.
Unidades de medição inercial para aplicações marítimas
Visão geral por
Sarah Simpson
Atualizado:
As unidades de medição inercial (IMUs) capturam e transmitem dados de movimento, orientação e posição em condições marítimas desafiadoras. Construídas para operar de forma confiável em plataformas de superfície e submarinas, essas unidades fornecem recursos essenciais de detecção para navegação, estabilidade e controle em missões oceanográficas, comerciais e relacionadas à defesa.
Componentes essenciais e funcionalidade das IMUs marítimas
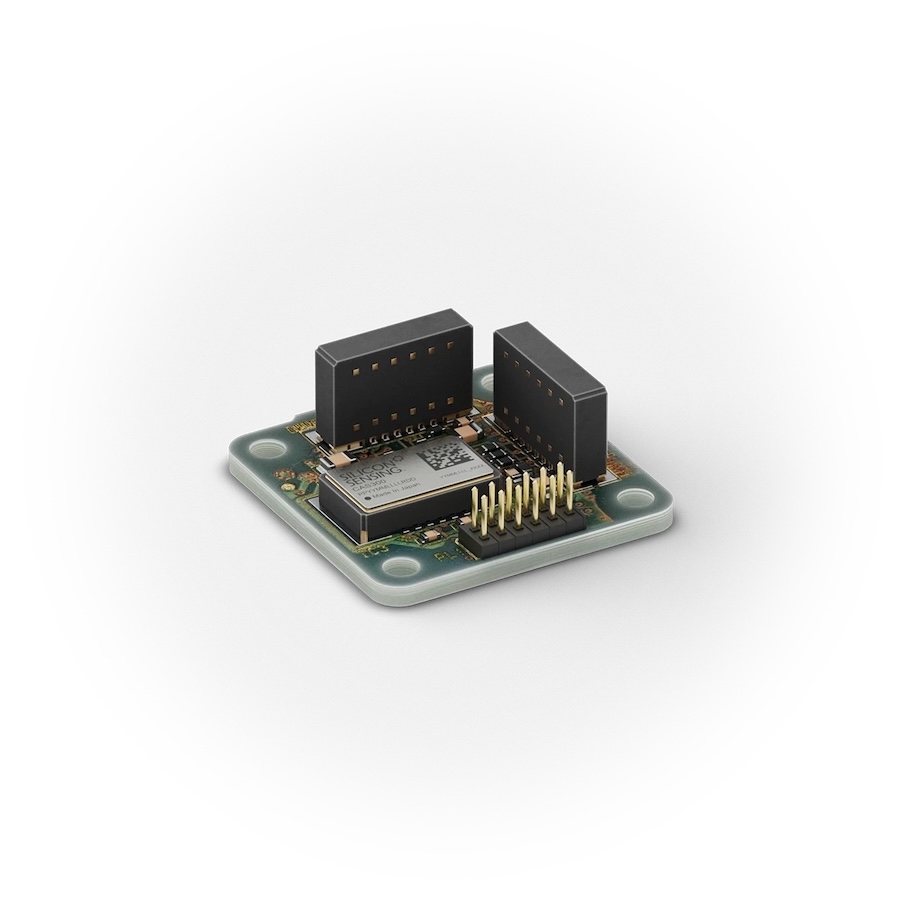
Uma IMU marítima integra sensores de alto desempenho — normalmente acelerómetros MEMS, giroscópios e, por vezes, magnetómetros — numa unidade de movimento inercial unificada. Estes componentes trabalham em conjunto para medir a velocidade angular e a aceleração linear ao longo de três eixos ortogonais. A saída é processada através de sistemas incorporados para fornecer um rastreamento preciso do movimento, mesmo na ausência de sinais de GPS.
Aplicações em AUVs, ROVs e navios
As IMUs de alta precisão são fundamentais para a autonomia e a eficiência operacional dos veículos subaquáticos. Em veículos subaquáticos autónomos (AUVs) e veículos operados remotamente (ROVs), elas permitem a navegação por estimativa, orientação e controlo em ambientes sem GNSS. Em embarcações de superfície, elas suportam a estabilização de rotação e inclinação, compensação de movimento para matrizes de sonar e sistemas de posicionamento dinâmico. A sua integração nessas plataformas garante confiabilidade em operações marítimas de alto desempenho.
Design de IMU de alto desempenho para condições marítimas
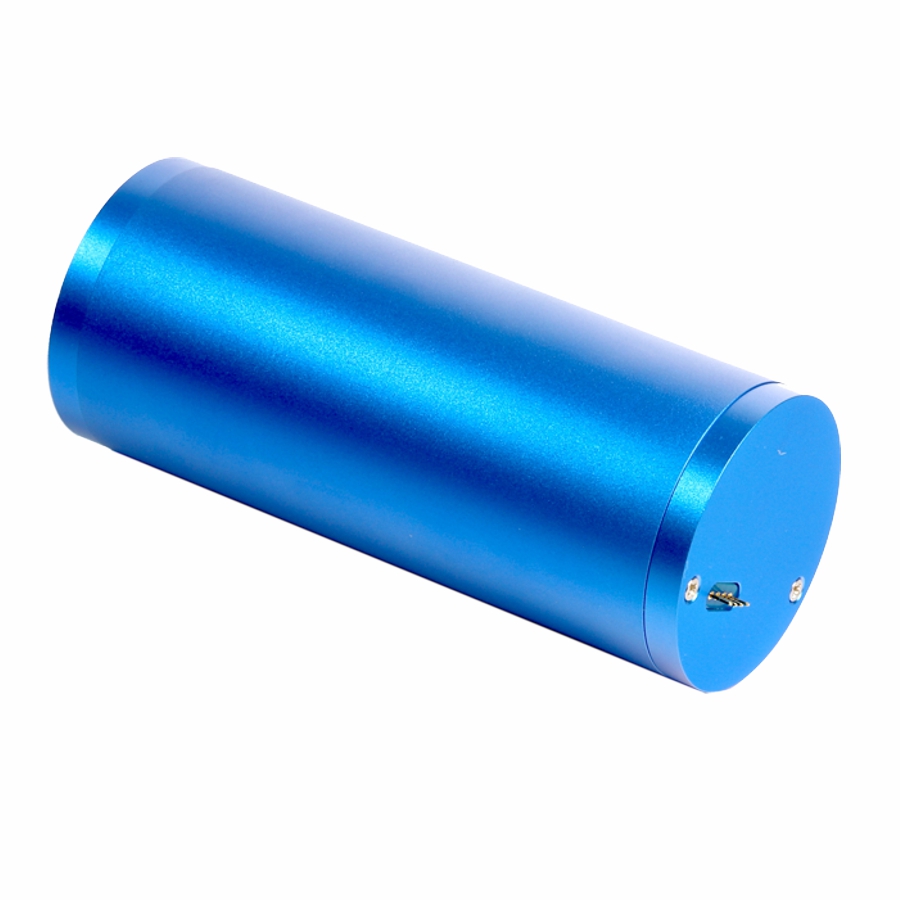
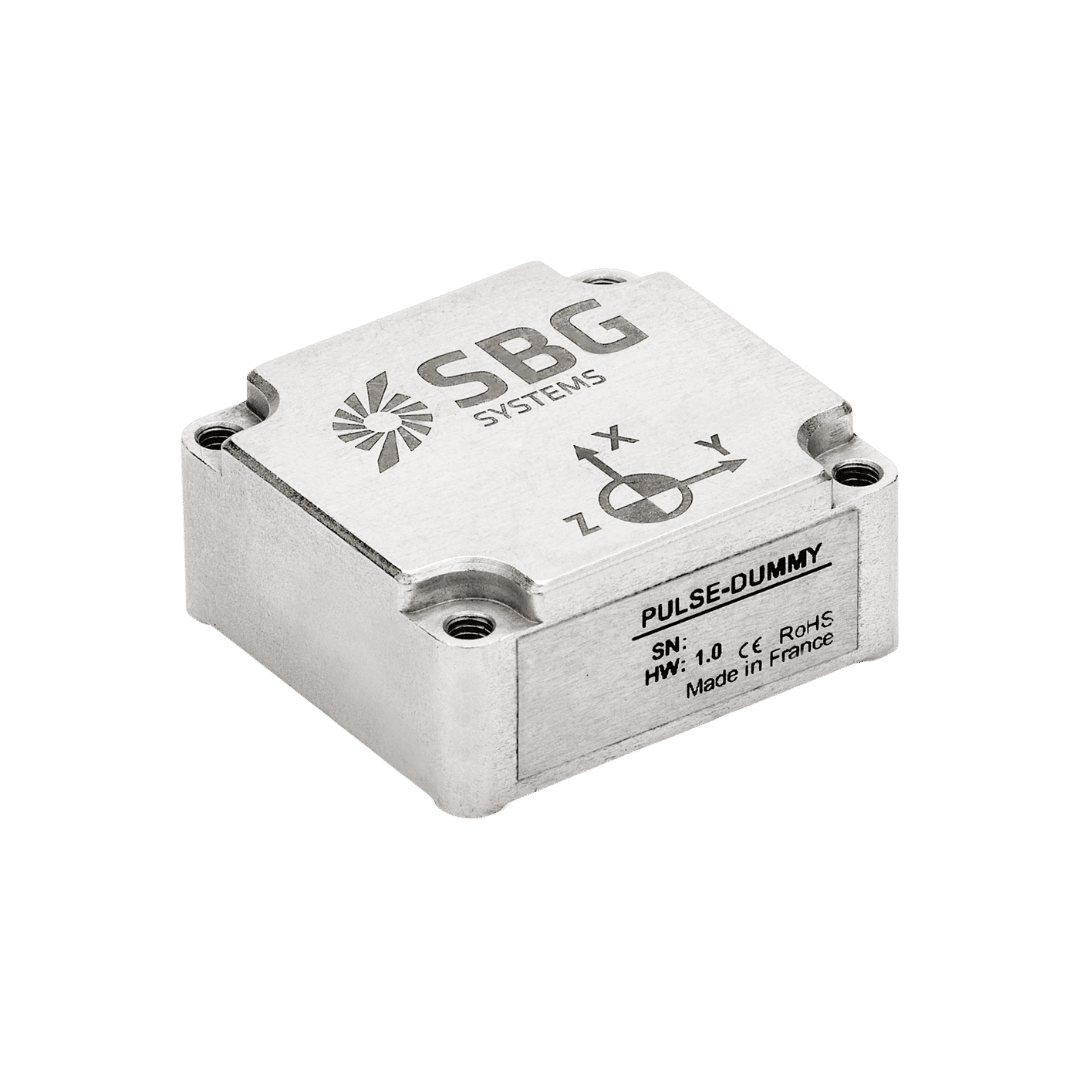
Os sistemas de medição inercial de nível marítimo são projetados para serem robustos, compactos e estáveis. Esses sistemas geralmente apresentam caixas resistentes à corrosão, vedação ambiental com classificação IP e calibração térmica avançada para suportar salinidade, mudanças de pressão e temperaturas extremas. Muitos são projetados como sistemas miniatura sem comprometer o desempenho inercial, permitindo uma implantação flexível em plataformas com espaço limitado.
Tecnologia de sensores de medição inercial: MEMS e além
Embora os MEMS (sistemas microeletromecânicos) dominem o mercado marítimo devido ao seu equilíbrio entre custo, tamanho e robustez, as aplicações que exigem desvio ultrabaixo podem utilizar giroscópios de fibra ótica (FOGs) ou giroscópios a laser em anel (RLGs). A escolha da tecnologia depende do nível de precisão exigido pela aplicação, da duração da missão e da exposição ambiental.
Rastreamento de movimento e integração de sistemas
As unidades de medição inercial geralmente operam como parte de sistemas maiores, incluindo sistemas de navegação inercial (INS) e conjuntos de navegação integrados que combinam GNSS, DVL (registos de velocidade Doppler) e posicionamento acústico. Esses sistemas dependem dos dados de alta fidelidade da IMU para fornecer atualizações de orientação e posição em tempo real, garantindo um rastreamento preciso em cenários marítimos dinâmicos e imprevisíveis.
Considerações de engenharia e métricas de precisão
É fundamental obter uma precisão de medição consistente ao longo do tempo e em condições variadas. As considerações de engenharia incluem minimizar o desvio do sensor, otimizar os algoritmos de fusão de dados e aplicar compensação de temperatura. As unidades de alto desempenho alcançam estabilidade de taxa angular e precisão de aceleração linear que suportam missões submarinas prolongadas sem fontes de correção externas.