Deep Trekker outlines how its PHOTON Remotely Operated Vehicle (ROV) was employed by restoration teams involved in Project REPARE, a long-term initiative in southern Brittany focused on restoring native European flat oyster populations and monitoring existing table oyster farms.
 The project operates in areas including Quiberon Bay and nearby river systems and is informed by historical habitat records alongside present-day seabed assessments. Its objective is to establish reliable baselines and support repeatable monitoring over an extended period.
The project operates in areas including Quiberon Bay and nearby river systems and is informed by historical habitat records alongside present-day seabed assessments. Its objective is to establish reliable baselines and support repeatable monitoring over an extended period.
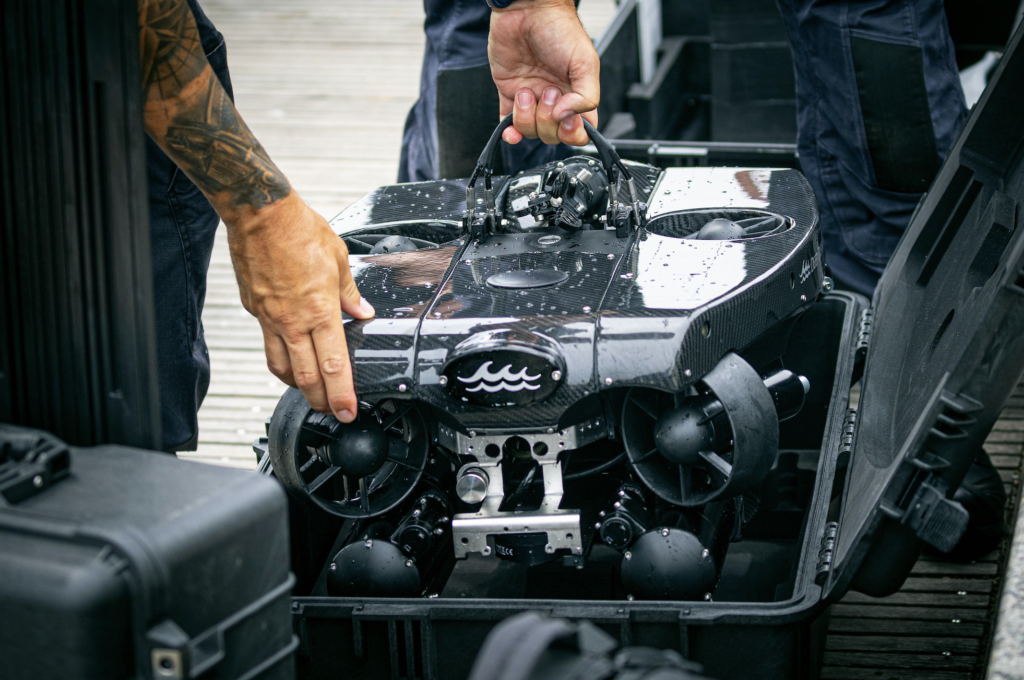
Within this context, the PHOTON ROV was used to provide consistent underwater inspections of seabed-dwelling flat oysters, which cannot be effectively surveyed using aerial methods. The vehicle enabled operators to assess oyster health, observe larval settlement on natural and artificial substrates, and identify predators such as starfish and oyster drills. Its stable platform and camera system supported detailed video and still imagery capture in turbid water and variable conditions, while the integrated grabber allowed for sample collection when required.
Data gathered using the PHOTON ROV formed part of a structured monitoring workflow that included GPS-referenced survey points, extended video recordings, and repeated inspections over time. The resulting imagery and footage were shared with state authorities to establish environmental baselines, verify seabed conditions, and support regulatory oversight of restoration activities. In parallel, the ROV was used to inspect oyster farm infrastructure such as nets and moorings, providing a permanent visual record while reducing reliance on diver-based inspections.
To learn more, visit Deep Trekker’s website.