Le Unità di Riferimento Verticale (VRU) sono sistemi di rilevamento inerziale che misurano il rollio e il beccheggio di un'imbarcazione rispetto al vettore gravità locale, fornendo i dati di assetto stabili necessari per la navigazione marina, il rilievo idrografico e le operazioni autonome. Combinando giroscopi, accelerometri e algoritmi avanzati di fusione dei sensori, le VRU offrono un'accurata compensazione del movimento in tempo reale in ambienti offshore dinamici.
Questa pagina presenta i produttori di unità di riferimento verticale che offrono sistemi con prestazioni a bassa latenza, robusta protezione ambientale e compatibilità con le interfacce e i protocolli marini standard del settore.
Se progettate, costruite o fornite Unità di riferimento verticale (VRU), create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.
La Guida completa alle unità di riferimento verticali (VRU)
Panoramica da
William Mackenzie
Aggiornato:
Introduzione alle unità di riferimento verticali
Un’unità di riferimento verticale (VRU) è un dispositivo di rilevamento inerziale specializzato che determina il rollio e il beccheggio di una piattaforma rispetto al vettore gravità locale. Stabilendo una stima continua e a bassa latenza dell’assetto, queste unità forniscono la linea di base verticale stabile richiesta dai sistemi di navigazione marina, di rilevamento idrografico, di posizionamento e di controllo autonomo.
Isolare con precisione l’allineamento verticale a bordo di un’imbarcazione in movimento è un compito ingegneristico molto complesso. Il sistema deve riuscire a separare l’accelerazione gravitazionale vera e propria dalle forze dinamiche transitorie causate dall’azione delle onde, dalle manovre della nave, dalle vibrazioni meccaniche e dai cambiamenti dello stato del mare. Mentre i sistemi marittimi si muovono verso la piena autonomia e una maggiore densità di dati, la qualità dei dati forniti da un’unità di riferimento verticale a bordo rimane un fattore critico per le prestazioni complessive del sistema.
Principi operativi delle unità di riferimento verticale
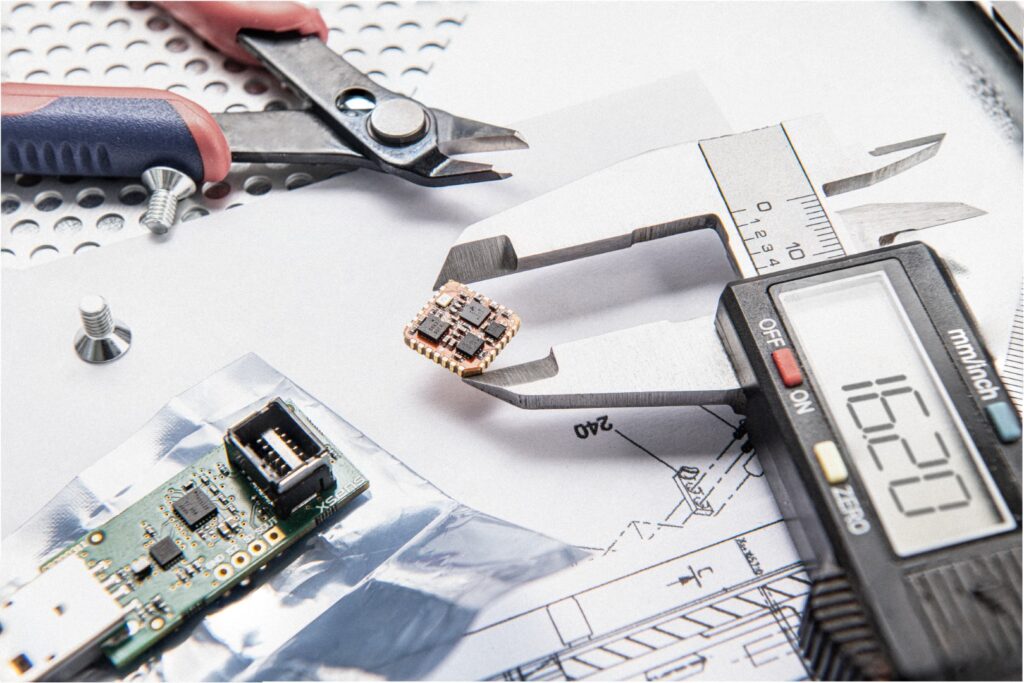
Moduli di sensori inerziali Xsens Serie Sirius con classificazione IP68, disponibili come VRU.
La funzione principale di un’unità di riferimento verticale è quella di stabilire il vero orientamento di una piattaforma rispetto al vettore gravità della Terra. A differenza dei sensori di inclinazione di base, che si guastano in presenza di accelerazioni dinamiche, le VRU di livello industriale sono progettate per funzionare in modo affidabile quando si verificano simultaneamente velocità di rotazione e accelerazioni lineari. Per ottenere questo risultato, il processore di bordo fonde continuamente i dati grezzi di più sensori inerziali interni, eseguendo algoritmi di filtraggio avanzati per isolare le accelerazioni lineari effettive del veicolo dall’accelerazione costante della gravità.
Misurazione di rollio e beccheggio
Il rollio e il beccheggio rappresentano i due principali gradi di libertà rotazionali che definiscono l’orientamento trasversale di una piattaforma marina. Una VRU monitora questi movimenti angolari accoppiando giroscopi ad alta velocità con accelerometri a basso rumore. I giroscopi catturano la velocità angolare istantanea per rilevare rapidamente gli spostamenti di orientamento, mentre gli accelerometri tracciano la direzione della gravità a lungo termine. La fusione di questi input assicura che l’assetto calcolato rimanga sufficientemente preciso per la stabilizzazione del sensore e la mappatura batimetrica, dove piccoli errori angolari possono tradursi in una significativa divergenza di posizione sul fondale marino.
Determinazione del riferimento verticale
Stabilire un riferimento verticale affidabile diventa difficile nel momento in cui una nave lascia il molo. Mentre la gravità fornisce una linea di base inequivocabile in condizioni statiche, le accelerazioni indotte dalle onde, le virate brusche e le variazioni di velocità introducono un rumore cinetico significativo. Le moderne unità di riferimento verticale superano questo ambiente utilizzando cluster di misurazione inerziale multiasse accoppiati a filtri di stima adattivi che tracciano i vettori di gravità a lungo termine, rifiutando i disturbi dinamici a breve termine.
Compensazione del movimento in tempo reale
La compensazione del movimento in tempo reale è una delle implementazioni più critiche per un’unità di riferimento verticale. Trasmettendo dati di assetto a bassa latenza, la VRU consente ai carichi utili periferici di contrastare attivamente il movimento del veicolo mentre vengono acquisiti i dati. Questa compensazione in tempo reale è fondamentale per gli ecoscandagli Multibeam (MBES), i sonar a scansione laterale, le piattaforme LiDAR marine, i gimbal delle telecamere ottiche, le antenne di comunicazione satellitare e le distribuzioni di sensori oceanografici.
Tecniche di elaborazione e filtraggio del segnale
Il vero elemento di differenziazione delle prestazioni di una moderna unità di riferimento verticale risiede nel suo firmware di elaborazione. I dati inerziali grezzi contengono rumore ad alta frequenza, vibrazioni strutturali e picchi transitori che devono essere filtrati prima di fornire l’orientamento dell’assetto. Gli ingegneri impiegano sofisticate architetture di fusione dei sensori, come i filtri di Kalman estesi (EKF) e le reti di filtraggio complementari, per bilanciare gli input dei sensori e regolare dinamicamente la ponderazione dei sensori in base alle condizioni operative.
Tecnologie di rilevamento fondamentali nei VRU
Sensori inerziali basati su MEMS
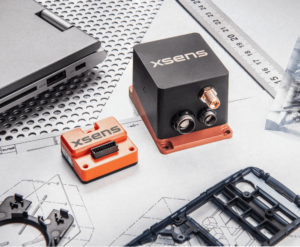
Soluzioni versatili di rilevamento inerziale della Serie MTi 600, disponibili come moduli VRU, di Xsens.
La tecnologia dei sistemi microelettro-meccanici (MEMS) costituisce il nucleo meccanico delle moderne VRU, offrendo un equilibrio di dimensioni compatte, bassa potenza ed elevata tolleranza agli urti, ideale per i veicoli di superficie senza equipaggio (USV). I progressi di fabbricazione nella stabilità di polarizzazione, nella riduzione del rumore e nella calibrazione termica in fabbrica consentono ai moderni VRU MEMS di livello tattico di raggiungere precisioni che in precedenza richiedevano architetture inerziali costose e ingombranti.
Accelerometri
Gli accelerometri a stato solido a tre assi misurano l’accelerazione lineare totale per registrare il vettore gravità continuo, stabilendo la linea di base per i calcoli di rollio e beccheggio assoluti. Poiché gli ambienti marini introducono un rumore cinetico significativo dovuto agli impatti delle onde e alla propulsione, i circuiti di elaborazione interni devono isolare costantemente la gravità dalle forze dinamiche, utilizzando design ad alta linearità che impediscano gli errori di rettifica delle vibrazioni.
Giroscopi
I giroscopi misurano il tasso di variazione angolare su tre assi ortogonali per catturare la rotazione dell’imbarcazione ad alta velocità e consentire una risposta immediata a spostamenti di orientamento inaspettati. Il tracciamento continuo della velocità angolare mantiene stabili i dati di orientamento tra gli aggiornamenti dell’accelerometro, il che significa che un tasso di deriva bias del giroscopio più basso estende direttamente la precisione del VRU durante le accelerazioni lineari sostenute.
Tecnologie di rilevamento del movimento a stato solido
La maggior parte dei VRU professionali si affida a configurazioni a stato solido per eliminare i punti di usura meccanica e ottimizzare la resistenza agli urti e alle vibrazioni. Questa architettura garantisce un’elevata affidabilità durante le distribuzioni offshore di lunga durata e le operazioni autonome in cui la manutenzione fisica è impossibile.
Fibre ottiche e tecnologie inerziali di alto livello
Per le applicazioni che richiedono un rumore bassissimo, i sistemi utilizzano le tecnologie FOG (Fiber Optic Gyroscope) o RLG (Ring Laser Gyroscope), grazie alla loro deriva di polarizzazione prossima allo zero e al basso random walk angolare. Questi strumenti di fascia alta sono fondamentali per la navigazione sottomarina in acque profonde, per i mezzi di difesa e per i rilievi idrografici di precisione, dove errori di assetto minimi compromettono le operazioni.
Architetture di fusione di sensori
Le prestazioni eccezionali delle VRU dipendono da un quadro di fusione dei sensori unificato che associa accelerometri, giroscopi e dati di ausilio esterni in un unico stimatore matematico di stato. Questa elaborazione cooperativa affronta le debolezze dei singoli sensori, come la sensibilità alle vibrazioni dell’accelerometro e la deriva del giroscopio, garantendo un risultato di assetto stabile in tutte le condizioni marine.
Costruzione dell’unità di riferimento verticale e architettura del sistema
Componenti hardware interni
Una VRU di livello industriale co-loca i suoi cluster di sensori inerziali, i microcontrollori ad alta velocità, i circuiti di isolamento dell’alimentazione e i livelli fisici di comunicazione all’interno di un alloggiamento schermato e resistente. Questo layout interno unificato garantisce un instradamento dei segnali a bassa latenza dagli elementi grezzi del sensore direttamente al nucleo di elaborazione primario.
Elettronica di elaborazione
Il processore di segnale digitale (DSP) o microcontrollore incorporato funge da spina dorsale computazionale dell’unità. Campiona gli array di sensori inerziali ad alta velocità, esegue complesse operazioni matriciali in virgola mobile per la fusione dei sensori e crea pacchetti di dati di uscita in tempo reale, gestendo al contempo le mappe di compensazione degli errori integrate per le correzioni di allineamento termico e trasversale.
Sistemi di gestione dell’alimentazione
Le reti elettriche delle navi sono notoriamente ambienti rumorosi, vulnerabili alle cadute di tensione e ai picchi induttivi. Le VRU dispongono di moduli interni di condizionamento dell’alimentazione per ridurre e stabilizzare la tensione CC in ingresso, incorporando l’isolamento galvanico e i circuiti di protezione da sovratensione per evitare che i picchi elettrici danneggino i componenti interni sensibili.
Protezione ambientale e design dell’alloggiamento
Gli alloggiamenti delle VRU sono in genere realizzati in alluminio anodizzato di alta qualità, titanio o plastiche marine specializzate, per offrire una protezione robusta contro la nebbia salina e l’ingresso di umidità. I componenti interni sono spesso fissati tramite supporti interni di smorzamento per disaccoppiare gli array di sensori primari dalle vibrazioni strutturali ad alta frequenza dello scafo, con gradi di protezione dall’ingresso come IP67 o IP68.
Software e firmware incorporati
Il firmware interno determina l’efficacia delle prestazioni di un’unità di riferimento verticale in condizioni di campo variabili. Le moderne architetture firmware includono framework aggiornabili sul campo, consentendo agli operatori di implementare coefficienti di filtraggio, profili di configurazione e set di strumenti diagnostici aggiornati senza dover estrarre l’hardware fisico dalla baia elettronica dell’imbarcazione.
Uscite, interfacce e formati di dati del VRU
Uscite analogiche e digitali
Sebbene le configurazioni marine tradizionali richiedano occasionalmente uscite di tensione analogiche a bassa latenza per loop di telemetria specializzati, le installazioni moderne si affidano quasi esclusivamente a interfacce digitali. La comunicazione digitale elimina le vulnerabilità del rumore di linea, preserva la risoluzione del sensore e supporta protocolli completi di controllo degli errori.
Interfacce di comunicazione seriale
RS-232: Uno standard fondamentale, ampiamente compatibile, da punto a punto, adatto per connessioni a breve distanza con la strumentazione tradizionale.
RS-422: Utilizzando la segnalazione differenziale, l’RS-422 offre un’elevata reiezione del rumore e supporta percorsi di cavi più lunghi attraverso scafi di grandi dimensioni.
RS-485: una configurazione bus multi-drop che consente a più sensori di comunicare in modo efficiente su linee seriali condivise all’interno di reti complesse.
Interfacce basate su Ethernet
Le interfacce Ethernet ad alta larghezza di banda (come UDP o TCP/IP) consentono alle unità di riferimento verticali di trasmettere dati di assetto ad alta velocità in modo simultaneo a più client, tra cui computer di rilevamento, motori autopilota e console di monitoraggio remoto, semplificando il cablaggio di rete di livello superiore.
Standard NMEA e protocolli di dati marini
Per garantire l’interoperabilità multi-vendor senza soluzione di continuità, le unità di riferimento verticale emettono in modo nativo stringhe di dati standardizzate NMEA-0183 e NMEA-2000 (come le frasi PRDID o PASHR). Molte suite di software di indagine proprietarie accettano anche formati binari specifici del settore, consentendo un’integrazione diretta senza livelli di traduzione dei dati.
Sincronizzazione temporale e integrità dei dati
Quando si correlano ecoscandagli multiraggio o nuvole di punti LiDAR con l’orientamento spaziale, gli errori di temporizzazione a livello di millisecondi creano artefatti spaziali significativi. Le VRU accettano riferimenti temporali esterni precisi (come i segnali PPS o i pacchetti di rete PTP/NTP) per datare i pacchetti di uscita all’istante esatto della misurazione.
Integrazione con le reti di navi
Nei layout moderni, l’unità di riferimento verticale funge da nodo centrale all’interno di un ampio ecosistema marittimo. L’interconnessione della VRU con i registratori di dati di viaggio, i motori di governo e le console operative remote migliora la consapevolezza della situazione e la sicurezza operativa.
Confronto con altri sensori di navigazione marittima
Tecnologia
Prestazioni
Applicazioni
VRU
Misura il rollio e il beccheggio dinamici rispetto all’asse verticale locale.
Compensazione del movimento, stabilizzazione della piattaforma e rilevamento idrografico di base.
MRU
Rileva il rollio e il beccheggio, ma aggiunge una vera misurazione dinamica dell’elica (spostamento verticale).
Rilievi multibeam di alta precisione, operazioni con gru offshore e monitoraggio dell’elisuperficie.
IMU
Emette tassi angolari grezzi e accelerazioni lineari senza calcolare una soluzione di assetto.
Sviluppo di guida personalizzata, filtraggio della navigazione da parte di terzi e progettazione di sistemi profondamente integrati.
AHRS
Combina il tracciamento del rollio e del beccheggio con la determinazione della direzione reale (imbardata), spesso tramite magnetometri.
Navigazione di veicoli senza equipaggio, loop di controllo autonomo e guida generale di imbarcazioni.
INS
Integra un IMU con un GNSS o un ausilio acustico per calcolare posizione, velocità e orientamento assoluti.
Navigazione autonoma ad alto rischio, posizionamento a lungo raggio e operazioni in ambienti non coperti da GNSS.
La scelta della corretta configurazione del sensore inerziale implica un bilanciamento tra i requisiti dell’applicazione e i vincoli di costo. Un’unità di riferimento verticale indipendente offre un’opzione efficiente e ad alte prestazioni per le configurazioni che richiedono solo la compensazione del rollio e del beccheggio sull’asse trasversale. Tuttavia, se l’impiego prevede una batimetria multibeam in cui il movimento verticale delle onde di marea deve essere eliminato, è necessaria un’unità di riferimento del movimento (MRU) completa con tracciamento dell’onda. Per una guida completa della piattaforma, un AHRS o un INS integrato sono la scelta standard.
Applicazioni di scienze marine e oceaniche delle Unità di Riferimento Verticale
Rilievo idrografico e mappatura dei fondali marini
Nella mappatura dei fondali marini, i dati batimetrici si basano molto sull’allineamento esatto dei sensori. Mentre un’imbarcazione per il rilevamento rolla e si inclina attraverso le onde, i fasci acustici degli ecoscandagli multibeam montati sullo scafo attraversano dinamicamente il fondale marino. Un’unità di riferimento verticale fornisce le correzioni angolari in tempo reale necessarie per allineare questi segnali acustici, garantendo modelli di topografia del fondo chiari e non corrotti.
Robotica marina e sistemi autonomi
La crescita degli USV, dei veicoli subacquei autonomi (AUV) e dei veicoli a comando remoto (ROV) ha ampliato l’applicazione degli strumenti di riferimento verticale. I controllori autopilota utilizzano i dati di assetto ad alta velocità di un’unità di riferimento verticale per eseguire regolazioni reattive del circuito di feedback, mantenendo percorsi di rotta stabili e profili di profondità uniformi attraverso correnti trasversali variabili.
Operazioni offshore
La costruzione di energia offshore richiede una sicurezza rigorosa e linee di base precise. A bordo delle navi di supporto dei parchi eolici, delle navi di rifornimento delle piattaforme petrolifere e delle chiatte di dragaggio, le VRU forniscono dati critici sull’orientamento agli argani di compensazione dell’ondulazione attiva e ai controllori di posizionamento dinamico. Questa integrazione stabilizza le gru e le pesanti linee di dispiegamento sottomarino durante le installazioni di risorse critiche.
Tendenze emergenti nella tecnologia di riferimento verticale
Il mercato del rilevamento inerziale marino si sta evolvendo rapidamente, spinto dalle mutevoli esigenze operative e dai progressi significativi nella produzione di hardware e nell’elaborazione del segnale.
Progressi MEMS di livello tattico: I continui miglioramenti nella progettazione della microstruttura e degli array di rilevamento capacitivo stanno riducendo drasticamente il rumore di fondo e la deriva di polarizzazione. Le moderne unità di riferimento verticale basate su MEMS raggiungono ora livelli di precisione che prima richiedevano costosi moduli in fibra ottica.
Modellazione degli errori abilitata dall’AI: L’apprendimento automatico e i filtri adattivi vengono integrati direttamente nel firmware del sensore. Modellando le dinamiche complesse delle imbarcazioni e le variazioni termiche, queste reti riducono la varianza di Allan ed eliminano il rumore non gravitazionale in modo più efficace rispetto ai tradizionali modelli statici di Kalman.
Fusione profonda multi-sensore: Le architetture moderne stanno andando oltre l’elaborazione inerziale standalone. I sistemi di nuova generazione fondono strettamente i dati di velocità in tempo reale provenienti dai registri di velocità Doppler (DVL) o RTK-GNSS direttamente nell’algoritmo di assetto primario, mitigando la deriva dell’orientamento durante le virate sostenute della nave.
Integrazione GNSS e INS incorporati: La divisione operativa tra VRU, AHRS e sistemi di navigazione inerziale completi sta scomparendo. I produttori stanno integrando i ricevitori GNSS multifrequenza direttamente nell’alloggiamento del VRU, creando soluzioni monocomponente che emettono simultaneamente la posizione, la rotta vera e le metriche di riferimento verticale.
Architetture di navi intelligenti interconnesse: Con il passaggio del settore marittimo alle infrastrutture digitali, le unità di riferimento verticali sono ora dotate di funzionalità di rete native. Supportano protocolli di streaming avanzati e analisi predittiva della salute, per una perfetta integrazione nelle suite di automazione navale.
Mandati per l’autonomia marittima: La proliferazione di Maritime Autonomous Surface Ships (MASS) e di droni senza pilota di lunga durata richiede un’estrema affidabilità dei componenti. Questo costringe a orientarsi verso la ridondanza interna dell’hardware e le routine avanzate di autodiagnosi nei sensori di movimento di prossima generazione.