Les véhicules sous-marins autonomes (AUV) explorent et cartographient les environnements sous-marins avec une autonomie et une précision croissantes, jouant un rôle essentiel dans la biologie marine, l'océanographie et la surveillance environnementale. De l'exploration des grands fonds marins à l'inspection des infrastructures et à la surveillance sous-marine, les AUV remplissent de nombreuses missions où l'accès humain est limité ou impossible.
Systèmes de véhicules robotiques sous-marins hybrides destinés à des opérations sous-marines polyvalentes dans les secteurs civil, de la sécurité et de la défense
Solutions innovantes de véhicules sous-marins autonomes pour les applications sous-marines dans les domaines de la recherche, de la science et de la sécurité
Si vous concevez, construisez ou fournissez Véhicules sous-marins autonomes (AUV), Créez un profil pour mettre en avant vos compétences et entrer en contact avec des visiteurs qui recherchent activement vos solutions.
Les AUV fonctionnent sans contrôle humain en temps réel, s’appuyant plutôt sur des ordinateurs embarqués, des systèmes de navigation et des logiciels de planification de mission pour accomplir des tâches complexes de manière autonome. Leur capacité à collecter des données scientifiques détaillées et à inspecter des environnements sous-marins difficiles les rend indispensables dans de nombreux domaines. Qu’il s’agisse de cartographier les fonds marins, de faciliter l’inspection des pipelines ou de mener des recherches sur les habitats marins, les AUV offrent une polyvalence et des performances inégalées.
Qu’est-ce qu’un AUV et en quoi diffère-t-il d’un ROV ?
Un véhicule sous-marin autonome (AUV) est un véhicule sous-marin sans pilote (UUV) qui se déplace dans l’eau sans intervention d’un opérateur. Contrairement aux véhicules télécommandés (ROV), qui sont reliés à un navire de surface et contrôlés en temps réel par un pilote humain, les AUV sont préprogrammés pour naviguer, collecter des données et revenir de manière autonome. Cela rend les AUV idéaux pour les missions prolongées dans des environnements profonds ou dangereux où une opération reliée est peu pratique ou impossible.
Les ROV offrent l’avantage d’une supervision humaine immédiate, ce qui peut être essentiel pour des interventions complexes ou délicates, telles que la manipulation d’équipements ou les réparations sous-marines. En revanche, les AUV excellent dans les tâches de longue durée, telles que les levés hydrographiques, la cartographie des fonds marins et les évaluations environnementales, où leur autonomie améliore l’efficacité et réduit les coûts opérationnels.
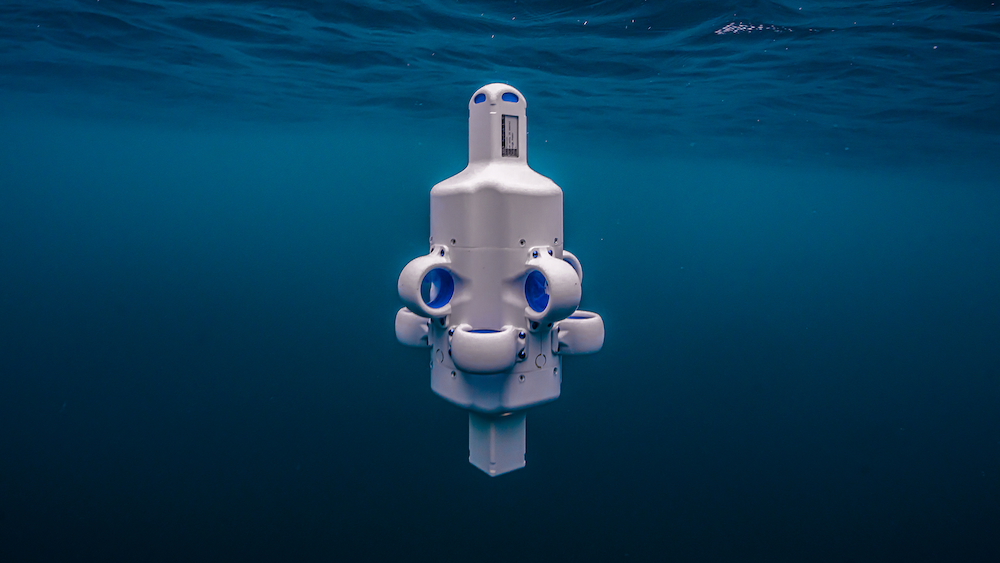
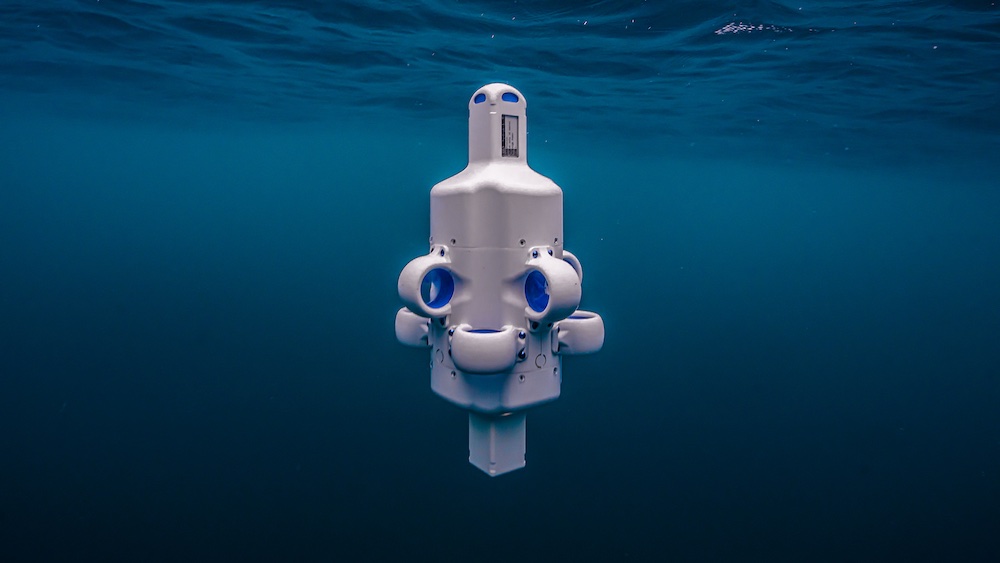
AUV Hydrus Micro Hovering d’Advanced Navigation
Types de véhicules sous-marins autonomes
Les AUV se présentent sous différentes formes et tailles, adaptées à des missions et des environnements spécifiques. Les catégories courantes comprennent :
AUV portables : légers et compacts, ils sont conçus pour être facilement déployés et récupérés par de petites équipes, et sont souvent utilisés dans le cadre d’études côtières ou d’opérations de recherche et de sauvetage.
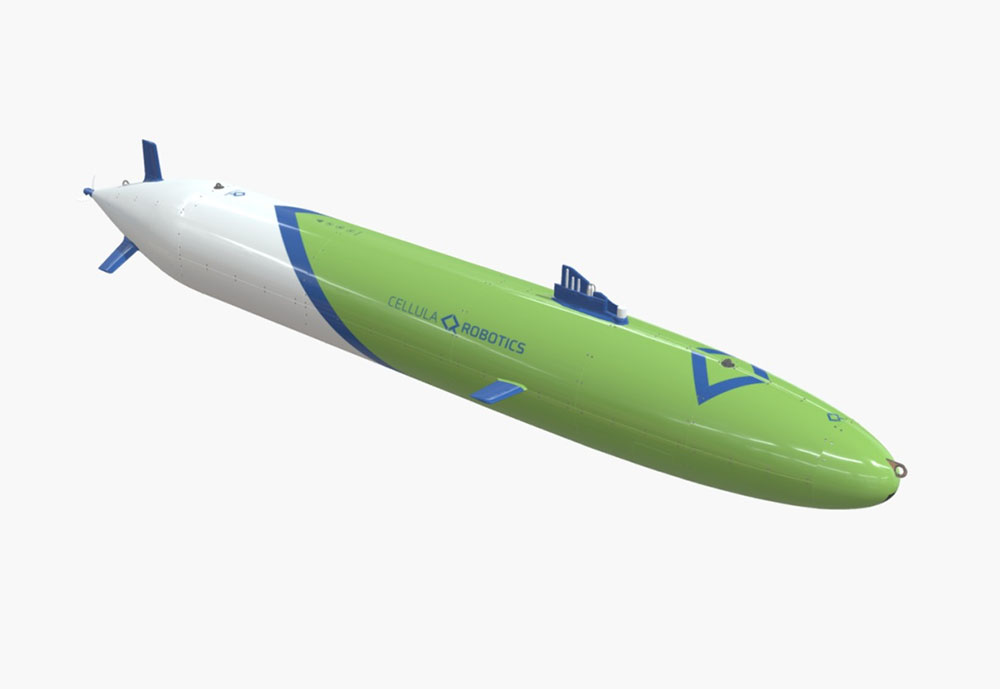
AUV à grand déplacement : équipés pour les missions en eaux profondes et à longue distance, ces véhicules offrent une endurance et une capacité de charge utile supérieures, ce qui les rend adaptés à la recherche océanographique et aux inspections énergétiques offshore.
AUV en vol stationnaire : ils combinent la maniabilité des ROV et l’autonomie des AUV, ce qui les rend idéaux pour les tâches nécessitant une inspection de proximité, telles que les levés de barrages ou de coques.
Systèmes hybrides AUV/ROV : ces systèmes peuvent fonctionner de manière autonome ou télécommandée, offrant une grande flexibilité pour les missions complexes ou dynamiques.
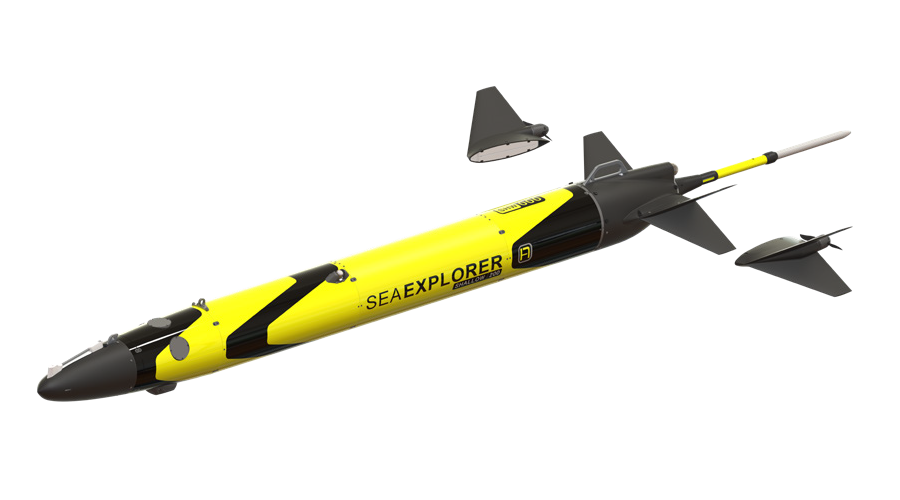
Planeurs sous-marins : les planeurs fonctionnent sans hélices, mais utilisent plutôt les changements de flottabilité et des ailes hydrodynamiques pour planer dans l’océan.
Applications des AUV
Les AUV sont indispensables dans diverses opérations maritimes :
Biologie marine et cartographie des habitats : ils sont utilisés pour observer les écosystèmes, suivre les espèces et prélever des échantillons d’eau et de sédiments avec un minimum de perturbations.
Océanographie et recherche climatique : déployés pour mesurer la salinité, la température, la turbidité et les niveaux d’oxygène dissous, contribuant ainsi à la surveillance environnementale à long terme.
Évaluation environnementale et intervention en cas de catastrophe : utilisé pour l’analyse des marées noires, la surveillance de l’érosion côtière et l’évaluation des fonds marins après un tsunami.
Archéologie et géologie sous-marines : utilisé pour cartographier les structures submergées, les épaves et les formations géologiques à l’aide de sonars haute résolution et de scanners laser.
Inspection des infrastructures : essentiel pour évaluer les pipelines, les câbles, les ports et les plateformes offshore sous-marins.
Défense et sécurité : utilisé dans la lutte contre les mines, l’identification des cibles, la surveillance militaire et la détection et l’enlèvement des munitions non explosées (UXO).
Recherche et récupération : équipé de caméras vidéo HD, de sonars et de manipulateurs pour localiser et récupérer des objets perdus en mer.
Exploration pétrolière et gazière : soutien à la cartographie des fonds marins, à la surveillance des pipelines et à l’évaluation de l’impact sur l’habitat pour les opérations offshore.
Technologies de base des AUV
AUV Guardian de Cellula Robotics
L’efficacité des AUV découle de l’intégration de sous-systèmes avancés qui permettent un fonctionnement indépendant et une collecte de données fiable. Les technologies clés comprennent :
Systèmes de navigation : les AUV s’appuient sur des systèmes de navigation inertielle (INS), des lochs Doppler (DVL), le GNSS (lorsqu’ils font surface) et des systèmes de positionnement acoustique tels que l’USBL et le LBL pour une navigation sous-marine précise.
Capteurs et instruments : les charges utiles courantes comprennent des sonars (à balayage latéral, multifaisceaux, à ouverture synthétique), des magnétomètres, des altimètres, des capteurs de température et de pression, et des capteurs de turbidité. Les fluorimètres, les capteurs de salinité et les capteurs CTD soutiennent la recherche scientifique, tandis que les caméras vidéo HD et les scanners laser améliorent la capture de données visuelles.
Propulsion et mobilité : les propulseurs et les systèmes de propulsion vectorielle permettent un contrôle précis et des capacités de vol stationnaire. Certains modèles utilisent des systèmes de ballast variable ou des moteurs de flottabilité pour contrôler la profondeur.
Systèmes énergétiques : des batteries lithium-ion haute densité, des piles à combustible et des systèmes avancés de gestion des batteries alimentent les missions de longue durée, souvent soutenues par des stations de recharge ou des systèmes d’amarrage autonomes.
Informatique et gestion des données : des ordinateurs embarqués, des modules de traitement de pointe et des processeurs IA gèrent la prise de décision en temps réel, l’évitement d’obstacles et l’enregistrement des données. Un logiciel de planification de mission est utilisé pour prédéfinir les objectifs et s’adapter aux exigences de la mission.
Systèmes de communication : les AUV communiquent via des modems acoustiques sous l’eau et des balises SATCOM ou RF à la surface. Les systèmes de télémétrie permettent une transmission limitée des données en temps réel pendant les opérations.
Considérations relatives à la conception des AUV spécifiques à une mission
La conception des AUV est influencée par les objectifs de la mission et les conditions d’exploitation. Les facteurs à prendre en compte sont notamment la taille, le poids, l’endurance, la configuration des capteurs et la modularité de la charge utile. Par exemple :
Les AUV légers destinés à des tâches en eaux peu profondes privilégient une forme compacte et une facilité de déploiement.
Les AUV à longue portée destinés aux missions polaires ou en eaux profondes privilégient l’efficacité énergétique, une isolation robuste et Advanced Navigation dans les environnements sans GPS.
La flexibilité de la charge utile est cruciale pour les missions de recherche, car elle permet l’intégration d’instruments scientifiques ou de systèmes d’échantillonnage personnalisés.
La conception robuste et la mousse syntactique maintiennent la flottabilité et résistent à la pression des grands fonds marins.
Capacités en évolution et tendances futures
IA et autonomie : l’apprentissage automatique et les processeurs IA embarqués améliorent le comportement adaptatif, permettant aux AUV de réagir de manière dynamique aux nouvelles données ou aux changements environnementaux.
Robotique en essaim : des flottes coordonnées d’AUV peuvent travailler ensemble pour couvrir des zones plus vastes ou effectuer des tâches simultanées, ce qui augmente l’efficacité dans des applications telles que la cartographie des fonds marins ou la détection de mines.
Communication sans fil sous-marine : les améliorations apportées aux communications acoustiques et optiques visent à réduire la dépendance au transfert de données en surface.
Systèmes d’alimentation durables : le développement de sources d’énergie alternatives, telles que les stations de recharge à énergie solaire ou houlomotrice, permet de mener des missions plus longues et plus durables.
Les AUV dans les sciences océaniques et au-delà
Les véhicules sous-marins autonomes transforment notre capacité à étudier, gérer et interagir avec l’environnement marin. Grâce à leur autonomie, leur précision et leur polyvalence inégalées, les AUV continuent de façonner l’avenir de la recherche océanographique, de la gestion des infrastructures sous-marines et de la gestion environnementale. Qu’ils soient déployés dans les glaces polaires, les fosses profondes ou les écosystèmes côtiers, les AUV sont à la pointe de la science et de la technologie océanographiques, offrant des informations et des capacités qui étaient autrefois hors de portée.