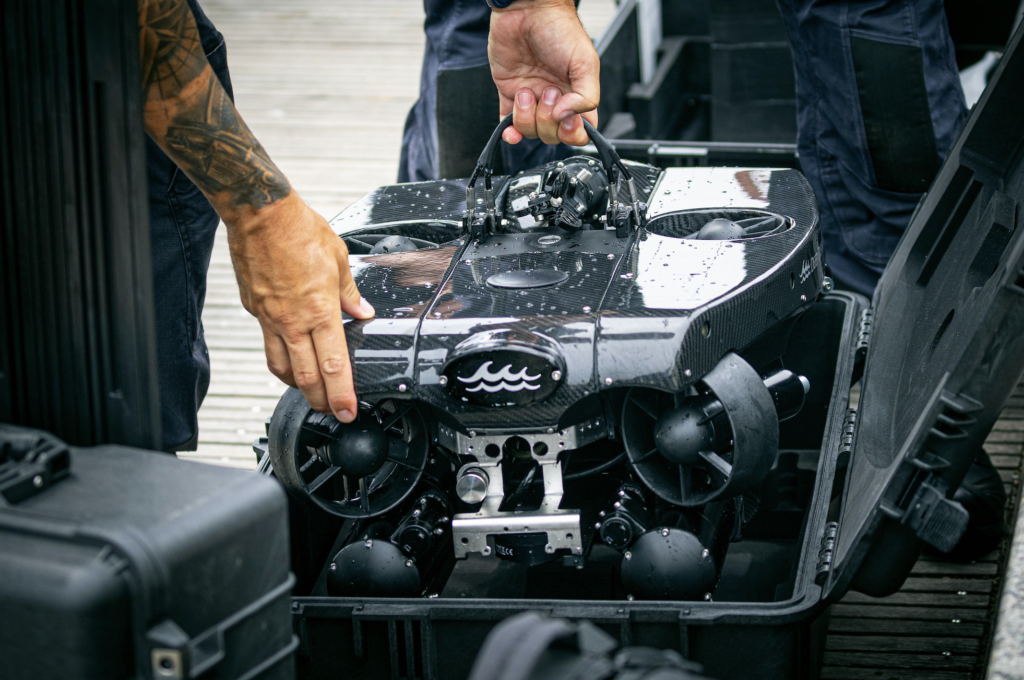
Deep Trekker has officially unveiled the SPECTRA ROV, a next-generation subsea robotic platform designed to establish a new performance class for portable inspection and survey Remotely Operated Vehicles.
Officially unveiled at Oceanology International 2026, the SEPCTRA is engineered specifically for deep-water, high-current operations and features a seven-thruster symmetrical propulsion layout. This architecture allows the ROV to maintain position in currents up to 3 knots from any direction and achieve forward speeds exceeding 4 knots.

The design focuses on precise low-speed modulation, which is critical for the close-proximity inspection of offshore structures, hulls, and assets within the volatile splash zone. Despite its power, the system remains hand-deployable, reducing the logistical complexity typically associated with work-class ROVs of similar capability.
“SPECTRA brings completely new capabilities to Deep Trekker, enabling us to push the boundaries of what can be achieved with our portable ROVs – something we have been known for since our beginnings.” commented Alan Middup, Deep Trekker President.
“We have taken a ground-up engineering approach, factoring in the broad experience we have built up from over a decade of developing subsea robotic systems. That makes SPECTRA the first in a new generation of ROV technology, one that we are incredibly excited to be launching!”
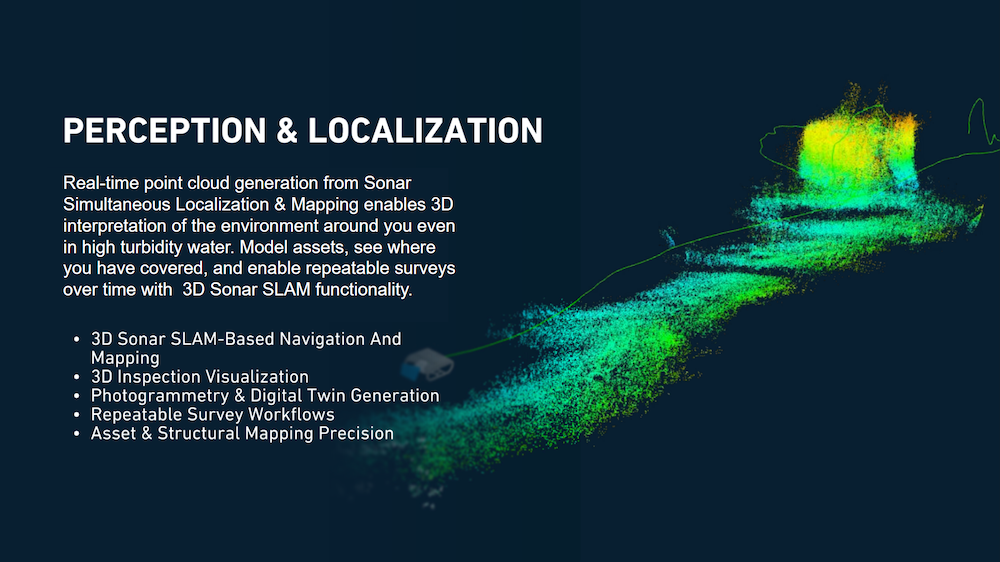
On-Vehicle SLAM Processing
A core advancement of the platform is the integration of real-time 3D Sonar Simultaneous Localization and Mapping (SLAM). This technology generates a live 3D point cloud of the surrounding environment, allowing operators to maintain spatial awareness and verify inspection coverage even in high-turbidity or zero-visibility conditions. All SLAM processing occurs on the vehicle’s internal computing hardware, removing the requirement for bulky external topside computers.
Cody Warner, Commercial Vice President, explains, “The biggest thing for a vehicle of this size is the ability to operate effectively in strong currents. It’s going to be deployed into some really tough environments. So, you need something that’s going to be able to not only move fast forwards, but also hold up in current from all directions. So, lateral movement is key here. And this vehicle is two to three times faster in any direction compared to any other ROV on the market.”
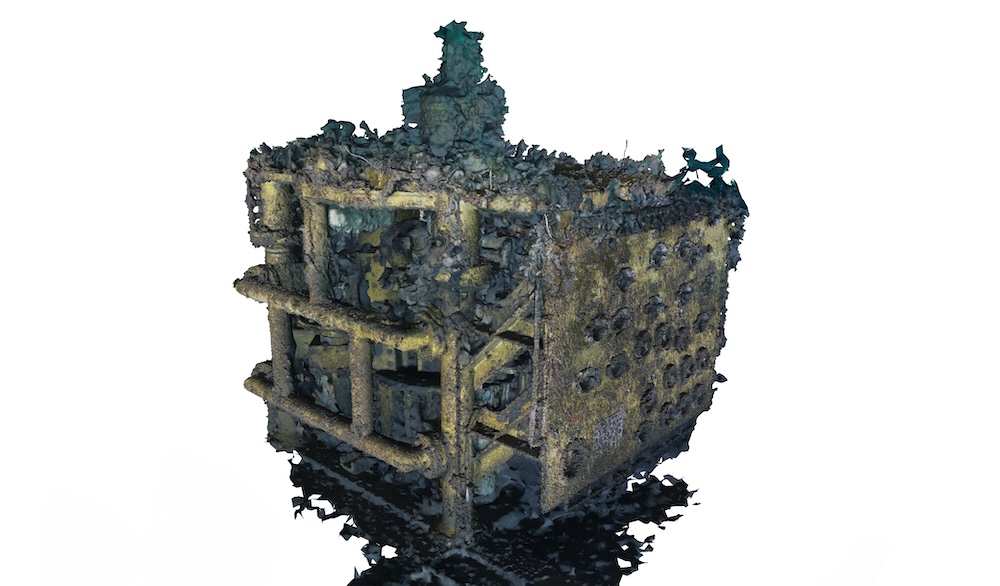
4K Stereo Vision
For visual data collection, the ROV utilizes a factory-calibrated 4K stereo camera system. This setup enables the generation of photorealistic, metrically scaled 3D models without the need for external reference markers or scale bars. The camera assembly features 180 degrees of rotation and is paired with a 300,000-lumen LED array that dynamically tracks the camera’s orientation to ensure optimal illumination.
“Bringing high-capability, scaled photogrammetry into an integrated and highly maneuverable platform is unmatched in the market today.” explains Engineering Director Chad Plesa-Naden, “Combined with the perception capabilities of Sonar SLAM integrated with onboard computing – which eliminates the need for bulky topside computers – this creates a highly sophisticated sensor payload in a fully portable package.
Developed & Tested for the Field
Designed for industrial reliability, the SPECTRA architecture allows for rapid field serviceability. Major subsystems, including thrusters, sensor pods, and camera heads, are designed to be replaced in 30 minutes or less to minimize downtime during offshore missions. The vehicle underwent extensive validation at world-class flume tanks and pressure testing facilities to ensure performance at its 1,000-meter depth rating.
Perception Engineering Manager at Deep Trekker, Vishal Panchal, discusses the SPECTRE’s camera system saying, “Our integrated stereo camera enables effective underwater 3D vision. With the Deep Trekker camera system, users can create photorealistic 3D models with metric scaling out of the box. This means that to model an underwater asset, there is no need to deploy a reference measurement marker. Users can start the inspection within the UI, download the data, and import the images into photogrammetry software to generate a fully scaled 3D model.
“SPECTRA features a very powerful continuous lighting system that follows the camera head. This ensures illumination is always aligned with the optical axis. When paired with a large-format, high-sensitivity image sensor, this combination illuminates underwater scenes more effectively than ever.”
Designed for the Mission
The platform is optimized for a variety of mission profiles, including offshore energy inspections, defense operations, and search and rescue. Its ability to host heavy sensor payloads and maintain stability in multi-directional currents allows it to perform tasks such as riser inspections, ship hull surveys, and benthic monitoring with high repeatability.
Discussing the design, Deep Trekker’s New Product Development Team Lead Engineer, Owen Hooper, explains, “We wanted this vehicle to be as robust as possible. It’s industrial equipment that operators will rely on day in and day out, so durability and repairability were top priorities. Ease of use was equally important – hand deployment ensures operators can simply place it in the water without requiring a crane or davit, making the system practical and accessible in the field.”
“To support the performance of SPECTRA, we’ve also raised the bar for testing. The vehicle underwent evaluations at world-class facilities, including flume tanks for performance and current-handling validation, and pressure testing beyond 1,000 meters depth. In parallel, our in-house testing pushed the system beyond expected field conditions, taking it to failure, analyzing results, iterating, and ultimately launching a highly optimized, robust platform” said Chad Plesa-Naden.

Discussing the release of SPECTRA, Serena Brown, Global Sales Manager, detailed the challenges of underwater offshore operations, and how SPECTRA aims to solve those long standing problems saying:
“Existing observation-class ROVs are often being pushed to the limits of station holding, low-visibility navigation, and repeatability. Operators frequently focus on maintaining position rather than efficiently completing missions. SPECTRA shifts this paradigm by providing greater thrust and stability for station holding in multi-directional currents, advanced perception through integrated 3D sonar and stereo cameras, and the ability to conduct repeatable, confident inspections in low-visibility or high-current conditions. This allows operators to focus on mission execution – how quickly data can be collected and tasks completed – rather than worrying about the vehicle’s ability to hold position.”
See the SPECTRA ROV at Oceanology International, London, Booth G550.