applied acoustics explains that for professionals engaged in subsea operations, accurately tracking underwater targets—whether stationary or moving—is essential.
An Ultra-Short Baseline (USBL) system facilitates this task through acoustic positioning. Understanding the functionality of USBLs will help operators select the right solution. This article reviews their features and how they differ in various depth applications.
USBL Functions
A USBL system is used to locate subsea objects across a broad range of water depths, from 5 to 5,000 meters or even deeper. Depending on industry or research area, users may be working in environments ranging from coastal areas to the deep sea.
USBLs are commonly used to track remotely operated vehicles (ROVs), autonomous underwater vehicles (AUVs), human divers, underwater infrastructure, and various equipment—both fixed and mobile. Additionally, USBLs are sometimes employed to map the seabed or as position referencing tools for surface vehicles.
Industries such as offshore wind, geology, surveying, military operations, and conventional energy often rely on USBLs to track assets, map the seafloor, and conduct inspections, maintenance, and repairs.
How a USBL Works
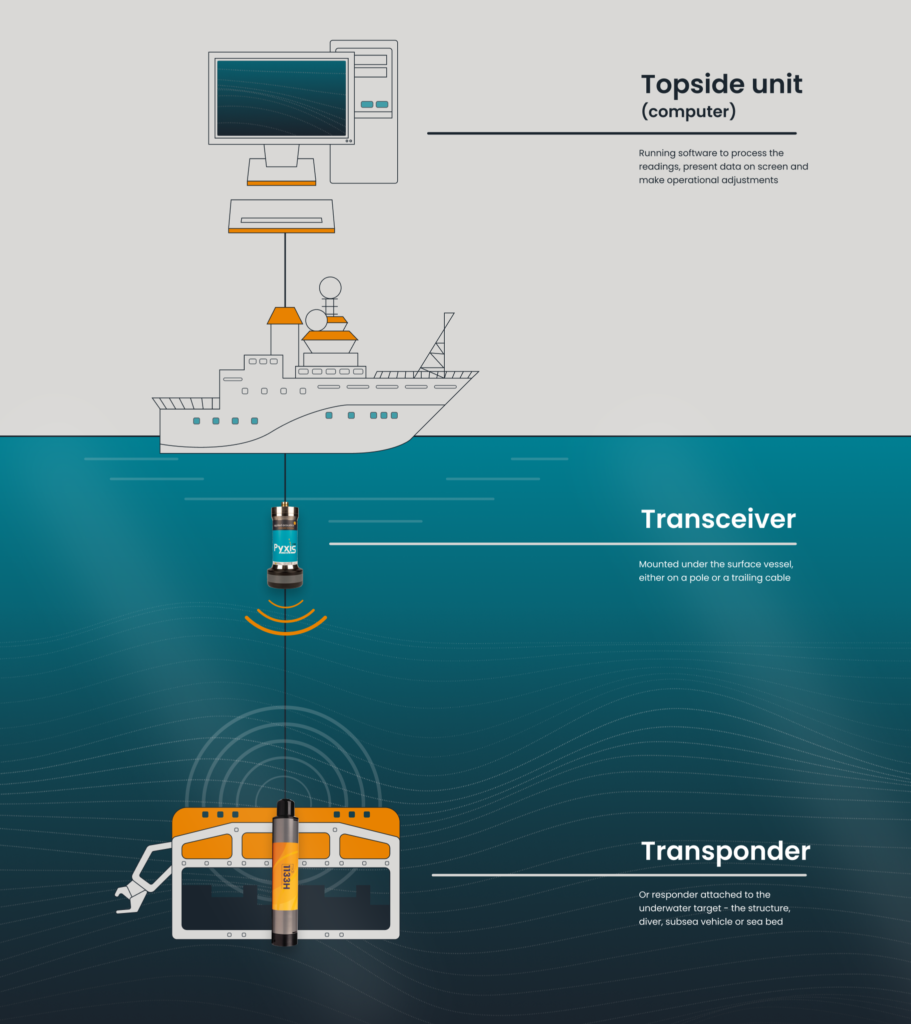
A USBL consists of three key components:
- A transponder or responder attached to the underwater target, such as a subsea vehicle, diver, structure, or the seabed
- A transceiver mounted on the surface vessel, typically on a pole or a trailing cable
- A topside unit (computer) running software to process the data, display results, and make adjustments
The system operates by emitting an acoustic signal from the vessel’s transceiver. This signal is received by the target’s transponder, which then sends the signal back to the transceiver. By measuring the time it takes for the signal to return and the direction of the return, the system calculates the target’s location relative to the vessel.
Transponder beacons vary in terms of power, battery life, and their ability to withstand pressure at specific depths. Smaller beacons are suited for divers, small ROVs, and short-range tracking, while larger beacons are used for extreme depths and long-term deployment, often as reference markers.
Transceivers also come in different sizes and configurations, with sensors either closely spaced or distanced by centimeters. The larger the array, the more precisely the system can detect variations in the returning signal and thus determine the target’s bearing. Basic transceivers can track up to four targets, while advanced systems can handle 10 to 16.
What Can Affect a USBL Reading?
At its core, a USBL system relies on sound traveling through water to determine the position of a target. Therefore, the speed of sound in water is the most critical factor for accurate readings. If the speed of sound is measured incorrectly, the target’s location will be incorrect as well.
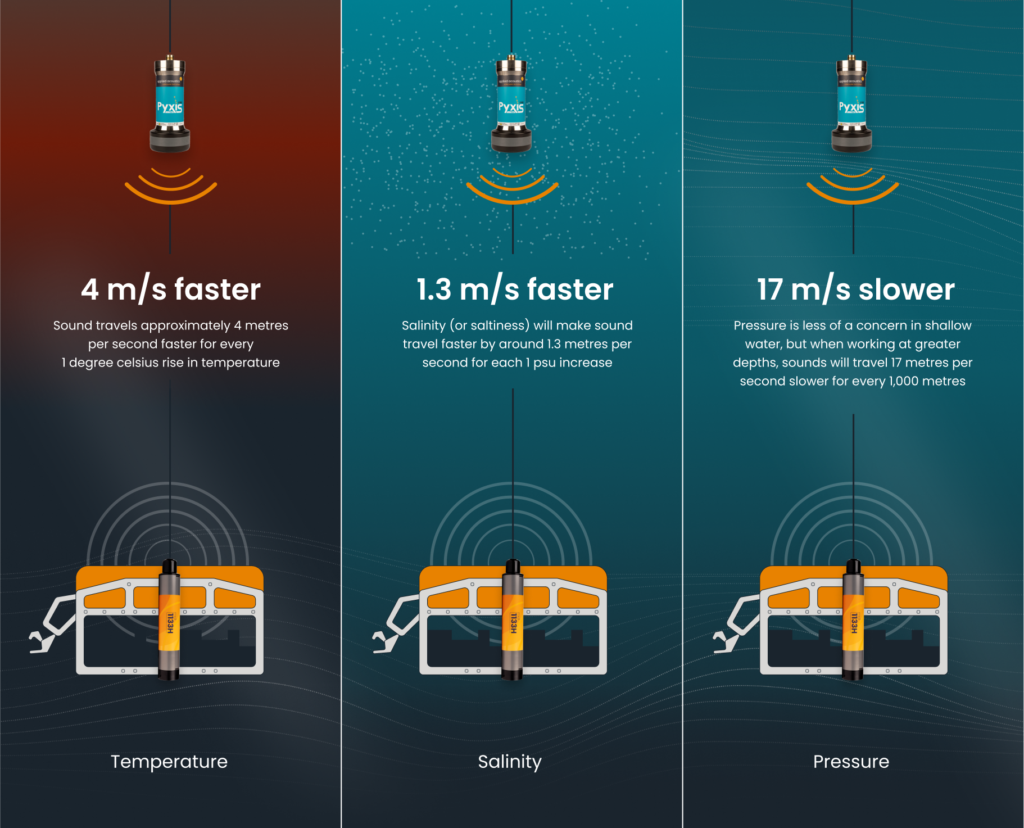
The speed of sound is not constant; it is influenced by the water’s temperature, salinity, and pressure. These factors must be accounted for during calculations. Water temperature varies from the surface to the seabed, with temperature differences affecting sound speed—sound travels approximately 4 meters per second faster for every 1°C rise in temperature.
Salinity, or the salt content of the water, also affects sound speed, with sound traveling 1.3 meters per second faster for each increase of 1 psu. Salinity can change based on proximity to the coast, where freshwater mixes with seawater. Pressure is less of a concern in shallow water, but in deep water, the sound travels 17 meters per second slower for every 1,000 meters of depth.
To account for these variables, it’s essential to use a dedicated sound velocity probe, which measures the sound speed in the water and allows users to calibrate the USBL system.
Additionally, transceivers should be positioned at least a meter below the vessel’s lowest point to minimize vibrations caused by the propeller or engine and reduce signal reflections from the ship’s hull.
Finally, integrating a gyrocompass and geological survey package with a USBL system will compensate for the vessel’s orientation and ensure a complete data set. These components are standard in aae’s products.
The Purpose of Shallow Water USBLs
Tracking objects or mapping the seabed in shallow water (up to 300 meters) requires a different approach compared to deep-sea projects, especially near harbors or coastlines. Typically, shallow water USBLs are used for tasks such as preparing offshore wind turbine foundations or monitoring divers inspecting underwater pipelines.
The key difference between shallow and deep-water USBLs lies in the transceivers. In shallow water, the sound pulses have a shorter distance to travel, so omni-directional transceivers are used. These can deliver accurate readings up to 1,000 meters and are capable of tracking nearly horizontally, making them ideal for shallow water environments.
The Purpose of Deep Water USBLs
Deep water USBLs are primarily used for geological studies, deep-sea exploration, and challenging environments. In deeper waters (300 meters to 5,000 meters or more), a directional transceiver and a more powerful transponder are required for precise tracking.
Directional transceivers focus the acoustic pulse into a cone of about 30 degrees. This becomes especially useful at depths of 750 meters or more, as the sonic cone widens with distance. To ensure accurate tracking, targets must remain within the cone. This is easier when directly above the target but can be more challenging when tracking moving targets.
For deep-water operations, applied acoustics recommends the MIPS 2785 and Pyxis 3780 systems, both of which can function at depths of up to 3,000 meters and include directional heads.
Uses of a USBL
The ideal USBL system will depend on various factors, including depth, water temperature, salinity, and the number of targets users need to track. Basic systems can handle up to four targets, while more advanced models can track 16 simultaneously.
Common applications for USBLs include:
- Research vessels, particularly in survey and construction sectors, where versatility is needed for varying depths and temperatures.
- Positioning and tracking remotely operated vehicles (ROVs) during inspections and exploration activities.
- Tracking and communication for diver safety, as transponder beacons can remain active beyond their operational life to assist in locating lost divers.
USBLs in the Field
With over 700 systems in use worldwide, we are proud to have a growing list of satisfied customers who benefit from the capabilities of applied acoustics’ USBL systems.
Ocean Scan, based in Chile, specializes in identifying shipwrecks, pipelines, debris, and underwater hazards. They integrated a Nexus 2 system with 1100 beacons and enhanced their setup with a GNSS system, basemap tools, and CAD/GIS files, resulting in significantly improved results in less time.
GEOxyz provides comprehensive offshore geophysical, geotechnical, hydrographic, and topographical surveys for the oil, gas, and renewable energy sectors. Their use of Nexus 2 and 1100 beacons has reduced survey times, increased accuracy, and enhanced client satisfaction.
If you’re involved in operations requiring precise positioning of structures, vehicles, or personnel in shallow or deep waters, you’ll appreciate the benefits of a high-quality USBL system. For specific project needs, applied acoustics engineers are available to assist.
In the meantime, with a solid understanding of how USBLs work, take a look at applied acoustics’ Easytrak Alpha, Nexus, and Pyxis USBL systems to determine the best solution for specific needs.