GNSS/INS für marine und maritime Navigationssysteme
Finden Sie Lieferanten und Hersteller von GNSS/INS-Systemen, die Satellitenortung mit Trägheitsmessdaten integrieren, um eine präzise Echtzeitnavigation für Marine- und Unterwasserplattformen zu ermöglichen, die in Umgebungen mit eingeschränkter oder fehlender GPS-Empfangsqualität betrieben werden.
Wenn Sie entwerfen, bauen oder liefern GNSS/INS, Erstellen Sie ein Profil, um Ihre Kompetenzen zu präsentieren und mit Besuchern in Kontakt zu treten, die einen konkreten Bedarf an Ihren Lösungen haben.
GNSS/INS für marine und maritime Navigationssysteme
Übersicht von
Olivia Hannam
Aktualisiert:
GNSS/INS – auch bekannt als GPS/INS-Technologien – bieten präzise Ortung und Navigation für Schiffe und maritime Fahrzeuge und verbessern so die Sicherheit, Effizienz und Autonomie in verschiedenen Einsatzumgebungen. Integrierte Lösungen mit globalem Navigationssatellitensystem (GNSS) und Trägheitsnavigationssystem (INS) werden zunehmend wichtiger für Einsätze, bei denen eine genaue räumliche Lageerkennung unerlässlich ist, selbst in Umgebungen ohne GNSS-Empfang, wie unter Wasser oder in der Nähe komplexer Küsteninfrastrukturen.
Diese Systeme kombinieren die globale Präzision der Satellitennavigation mit der lokalen Genauigkeit von Trägheitssensoren. Diese Fusion gewährleistet zuverlässige Echtzeitdaten zu Position, Ausrichtung und Geschwindigkeit für bemannte und unbemannte Plattformen, die auf oder unter der Meeresoberfläche operieren. Diese Systeme unterstützen alles von der Kartierung des Meeresbodens bis zum autonomen Andocken und sind für intelligente Marineoperationen sowohl im kommerziellen als auch im Verteidigungsbereich von entscheidender Bedeutung.
Unterwasser- und Marine-GNSS/INS-Anwendungen
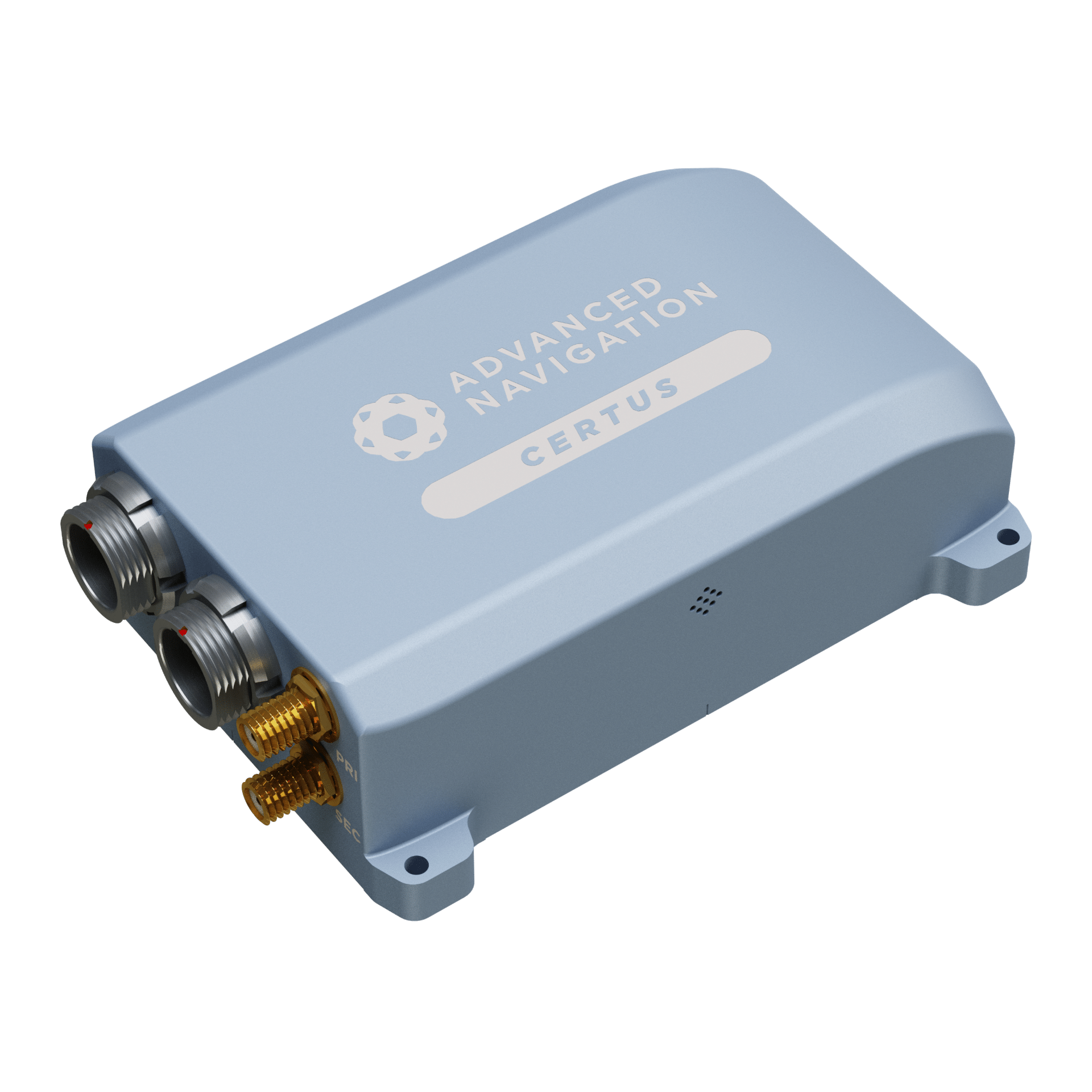
Boreas D90 digital FOG GNSS-INS von Advanced Navigation
GNSS/INS-Systeme werden in vielen maritimen Anwendungen eingesetzt und liefern hochpräzise Navigations- und Orientierungsdaten für Schiffe und Plattformen, die in komplexen oder dynamischen Umgebungen operieren. Typische Anwendungsfälle sind:
Hydrografische und bathymetrische Vermessungen
Vermessungsfähige GNSS/INS-Systeme werden in Mehrstrahl- und Einstrahl-Echolotgeräten eingesetzt und liefern genaue georeferenzierte Tiefendaten für die Charakterisierung des Meeresbodens, Baggerarbeiten und die Infrastrukturplanung.
GNSS/INS für ferngesteuerte Unterwasserfahrzeuge (ROVs)
ROVs, die Kabelinspektionen, Wartungsarbeiten oder Bergungen durchführen, sind auf eng gekoppelte GNSS/INS-Daten angewiesen, die von Oberflächenfahrzeugen übertragen werden, um ihre Position zu halten und kontrollierte Bewegungen auszuführen.
GNSS/INS für autonome Unterwasserfahrzeuge (AUVs)
AUVs verwenden eingebettete Trägheitssysteme und gelegentliche GNSS-Positionsbestimmungen an der Oberfläche oder über akustische Modems, um komplexe Missionen in Unterwasserumgebungen ohne GNSS-Empfang zu navigieren.
GNSS/INS für unbemannte Oberflächenfahrzeuge (USVs)
Ermöglicht autonome Wegpunktnavigation, Positionshaltung und dynamische Ausweichmanöver für USVs, die in den Bereichen Vermessung, Sicherheit und Umweltüberwachung eingesetzt werden.
Schiffsnavigation und Kollisionsvermeidung
Große Schiffe verwenden integrierte Navigationssysteme für eine sichere Routenführung, das Anlegen und die Kollisionsvermeidung bei dichter Verkehrslage oder schlechter Sicht.
Baggerarbeiten und Hafenbetrieb
Eine genaue INS-korrigierte Positionierung verbessert die Verfolgung des Baggerkopfes, das Sedimentmanagement und die Ausrichtung der Hafeninfrastruktur.
Offshore-Anlagenüberwachung
Unterstützt die Stabilisierung und Verfolgung von schwimmenden Plattformen, Kränen und Sensorarrays, die in Offshore-Öl- und Gas-, Wind- und Meeresenergieanlagen eingesetzt werden.
In vielen Betrieben wird GNSS/INS in Kombination mit automatischen Identifikationssystemen (AIS), Schiffsverkehrsdiensten (VTS) und Sonar für eine umfassende maritime Lageerfassung eingesetzt.
Typen und Architekturen von GNSS/INS-Systemen
Ermöglicht autonome Wegpunktnavigation, Positionshaltung und dynamische Ausweichmanöver für USVs, die in den Bereichen Vermessung, Sicherheit und Umweltüberwachung eingesetzt werden.
[Bildunterschrift id=”attachment_21536″ align=”alignright” width=”266″]Kompaktes, leistungsstarkes GNSS/INS von SBG Systems.[/caption]
Taktisches IMU-basiertes INS: Systeme, die auf taktischen MEMS- oder kompakten FOG-Sensoren basieren. Diese bieten ein ausgewogenes Verhältnis zwischen Genauigkeit, geringem Stromverbrauch und kleiner Bauform, weshalb sie häufig in USVs, kleinen AUVs und tragbaren Vermessungsgeräten zum Einsatz kommen.
Vermessungs-INS: Enthält leistungsstarke FOG- oder Ringlasergyroskope, die in Kombination mit RTK-Korrekturdaten eine Genauigkeit im Zentimeterbereich ermöglichen. Weit verbreitet in hydrografischen Vermessungen, ROV-Einsätzen und präzisen Georeferenzierungsaufgaben.
Hochpräzise eingebettete Einheiten: Kompakte GNSS/INS-Module, die in Steuerelektronik oder Nutzlasten integriert sind und für ROVs, AUVs, UAVs und Sensorkapseln optimiert sind, bei denen der Platz begrenzt ist.
EGI-Systeme (eingebettetes GPS/INS): Werden in der Regel in Verteidigungs-, See- und Luftfahrtsystemen eingesetzt und kombinieren robuste IMUs mit sicherem, störungsfreiem GNSS für missionskritische Navigation und Zielerfassung.
Marine-Strapdown-Systeme: Solid-State-Designs ohne bewegliche Teile, die Robustheit in hochdynamischen Umgebungen und Widerstandsfähigkeit gegen mechanische Stöße und Vibrationen bieten.
AHRS-Module: Lage- und Kursreferenzsysteme liefern Orientierungsdaten in Echtzeit und werden häufig in GNSS/INS in maritimen Plattformen integriert, um die Stabilisierung, automatische Kurssteuerung und Kontrolle von Schiffen zu unterstützen.
Kopplungsarchitekturen definieren, wie die Datenintegration verwaltet wird:
Lose gekoppelt: GNSS- und INS-Daten werden unabhängig voneinander verarbeitet und auf einer höheren Ebene zusammengeführt. Einfacher, aber weniger widerstandsfähig in anspruchsvollen Umgebungen.
Eng gekoppelt: Rohe GNSS-Signaldaten und INS-Ausgaben werden direkt kombiniert, was die Navigation auch mit weniger als vier Satellitensignalen ermöglicht.
Tief oder ultrastark gekoppelt: Integriert GNSS-Signalverfolgungsschleifen mit Trägheitsdaten und verbessert so die Widerstandsfähigkeit gegen Störsignale und Spoofing.
Leistungsfaktoren und -kennzahlen
Die Systemleistung wird anhand mehrerer wichtiger Dimensionen bewertet:
Positionsgenauigkeit: Hochwertige Systeme erreichen mit RTK- oder PPP-Korrekturen eine Genauigkeit im Submeter- bis Zentimeterbereich. Die Genauigkeit kann durch GNSS-Ausfälle beeinträchtigt werden, wird jedoch durch INS stabilisiert.
Lagegenauigkeit: Roll-, Nick- und Giermessungen sind für die Ausrichtung der Plattform von entscheidender Bedeutung, insbesondere bei dynamischen Bewegungen.
Kursauflösung: Besonders wichtig für das Andocken, die Verlegung von Unterwasserkabeln und die Navigation in der Nähe von Hindernissen.
Latenz und Aktualisierungsrate: Für Echtzeit-Regelkreise in autonomen Systemen ist eine hochfrequente Datenausgabe erforderlich.
Robustheit: Systeme werden insbesondere bei Einsätzen in der Marine auf Stoßfestigkeit, Vibrationsfestigkeit, Temperaturbeständigkeit und elektromagnetische Verträglichkeit (EMV) geprüft.
High-End-Systeme können auch Anti-Spoofing, Interferenzminderung und Redundanz durch mehrere GNSS-Konstellationen oder Hilfssensoren umfassen.
Regulatorische und industrielle Standards
GNSS/INS-Lösungen, die in maritimen Umgebungen eingesetzt werden, entsprechen häufig internationalen und militärischen Standards. Dazu gehören:
IMO-Leistungsstandards: Für schiffsfähige GNSS-Geräte in Handelsschiffen.
NMEA 0183 / NMEA 2000: Kommunikationsprotokolle für Schiffselektronik.
MIL-STD-810 und MIL-STD-461: Umwelt- und elektromagnetische Standards für Marine- und Verteidigungsplattformen.
STANAG 4576: Definiert INS-Parameter und -Formate für NATO-Streitkräfte.
RTCM SC-104- und NTRIP-Protokolle: Werden für die Übertragung von GNSS-Korrekturdaten in Echtzeit verwendet.
Die Einhaltung dieser Standards gewährleistet die Interoperabilität der Systeme, die Missionssicherheit und die Sicherheit der Navigation in internationalen Gewässern.
Integration in Marinesysteme
Moderne GNSS/INS-Systeme werden zunehmend in andere Schiffssubsysteme integriert, um einen Echtzeit-Datenaustausch, eine Echtzeit-Steuerung und eine Echtzeit-Überwachung zu ermöglichen. Beispiele hierfür sind:
Sensorfusion mit Sonar und DVL: Für eine verbesserte Unterwassernavigation und Kartierung des Meeresbodens.
Verbindung zu Autopiloten und Triebwerken: Ermöglicht dynamisches Positionieren und präzises Manövrieren beim Anlegen oder beim Einsatz von Ausrüstung.
Einsatzmanagementsysteme: Echtzeit-GNSS/INS-Daten versorgen autonome Einsatzplaner und Navigationscomputer.
Flottenmanagement-Plattformen: Verwendung von GNSS/INS-Daten für die zentralisierte Überwachung, Routenoptimierung und operative Koordination über Schiffsgruppen hinweg.
Dashboards zur Situationserkennung: Bereitstellung von fusionierten Geodaten, Warnmeldungen und Diagnosen für Navigationscrews oder Fernbediener.
Die Interoperabilität wird durch standardisierte Datenbusse (z. B. CAN, Ethernet), Software-APIs und modulare Hardwarearchitekturen verbessert.
Zukünftige Entwicklungen und Trends
Da maritime Operationen zunehmend autonomer und datengesteuert werden, entwickeln sich GNSS/INS-Technologien weiter, um den höheren Anforderungen an Genauigkeit, Ausfallsicherheit und Integration gerecht zu werden:
Maschinelles Lernen für die Sensorfusion: Es werden KI-basierte Fusionstechniken entwickelt, um die Robustheit unter verschlechterten oder ungünstigen Bedingungen zu verbessern.
Kompakte, hochgenaue IMUs: Ermöglichen eine bessere SWaP-C-Leistung für kleine unbemannte Plattformen.
Multisensor-Redundanz: Kombination mehrerer GNSS-Empfänger, IMUs und Hilfssensoren, um Failover-Fähigkeiten bei kritischen Missionen bereitzustellen.
Forschung zur Navigation ohne GNSS: Erforschung hybrider Ansätze unter Verwendung von Magnetometern, bildbasierter Lokalisierung und Trägheitssensoren.
Cybersicherheit und Absicherung: Verbesserung des Schutzes vor Störsignalen, Spoofing und Cyberangriffen, insbesondere in Verteidigungs- und Dual-Use-Systemen.
Die kontinuierliche Weiterentwicklung von GNSS/INS ist für die Verbesserung der maritimen Autonomie, Sicherheit und Lageerkennung in allen Weltmeeren von entscheidender Bedeutung.























 Kompaktes, leistungsstarkes GNSS/INS von SBG Systems.[/caption]
Kompaktes, leistungsstarkes GNSS/INS von SBG Systems.[/caption]

