SubC Imaging highlights the Rayfin Trench, an 11,000-meter-rated subsea camera designed for deep ocean landers, Autonomous Underwater Vehicles (AUVs), and other untethered systems.
The camera is built for high-quality imaging at depth and supports autonomous workflows through a no-code script builder that automates capture, lighting, and sensor-triggered actions.
Hadal missions are different. Once operating deeper than 6,000 meters, there is no option to adjust systems live. Missions are planned, deployed, and the system is required to operate without supervision. In this environment, autonomy matters more than almost any single specification.
In hadal deployments, autonomy includes capturing only what is required so storage and power are not used unnecessarily during descent and transit phases, coordinating the payload so the camera, lights, and sensors operate in sync, triggering actions based on real conditions rather than fixed timing, and supporting long-duration missions using sleep and wake cycles. The Rayfin Trench is designed around these requirements.
No-Code Scripting for Subsea Missions

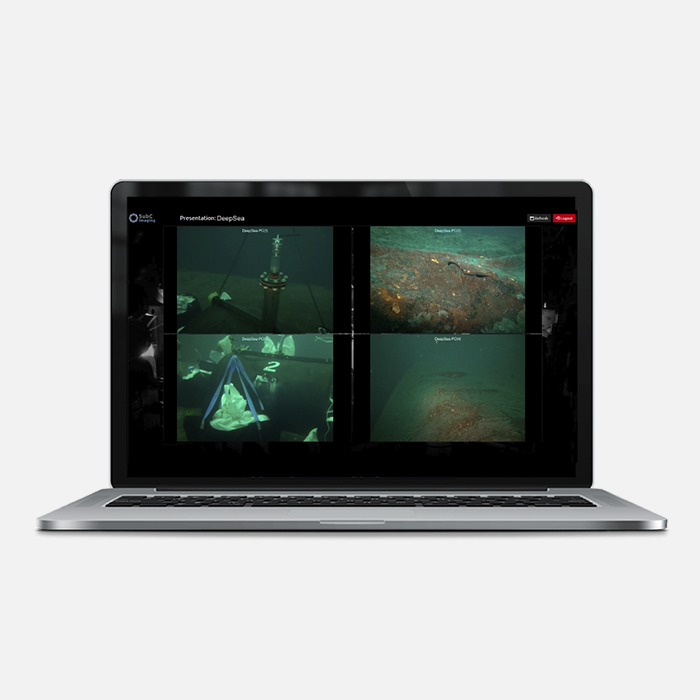
Example of no-code script
The Rayfin Trench includes a no-code script builder designed for visual configuration of mission logic. This removes the need for custom coding or one-off scripting. The system enables users to define schedules, event-based triggers, and conditional actions such as recording only when defined conditions are met or activating lights only during capture. The interface uses drag-and-drop logic aligned with subsea mission planning.
Event-Based Capture
At extreme depth, continuous recording increases power draw, uses storage capacity, and creates larger volumes of footage for review after recovery. Event-based capture allows recording to occur only when defined conditions are met. The Rayfin Trench supports triggers using internal orientation sensing, including tilt and roll, as well as external inputs such as NMEA data. This allows recording to begin when a lander is stable on the seabed or during defined operational windows.
Coordinating Lights, Lasers, and Sensors
Autonomous imaging includes control of lighting and other payload components. These elements are a significant source of power use and must operate in coordination with the camera. The Rayfin Trench can be configured to trigger and power external devices through its auxiliary ports, including Aquorea Trench LEDs, lasers, and third-party sensors. This enables the payload to operate as a single system.
Hibernation and Wake Cycles
For long-duration deployments and time-lapse applications, power availability is a limiting factor. Missions often use a wake, capture, and sleep pattern to extend operational duration. The Rayfin Trench supports an optional hibernation approach that allows scheduled capture windows followed by low-power states between them.
Example Autonomous Mission Workflow
A hadal lander deployment can follow a defined sequence. The system starts with lights off, waits until a depth threshold is reached, and then waits 60 seconds for tilt and roll stabilization. Lights are then turned on at a preset intensity. Video is recorded in 10-minute segments, and still images are captured every five minutes. Recording stops at a scheduled end time or when a low-battery threshold is reached.
Operational Outcomes
The Rayfin Trench reduces manual setup and the need for custom scripts, provides control over power usage and storage, results in datasets with fewer periods of unused footage, and supports repeatable mission configuration across deployments and platforms.
Full ocean depth operations do not allow mid-mission changes, and systems must operate as configured. The Rayfin Trench supports autonomous imaging through no-code scripting, event-based triggers, coordinated payload control, and optional hibernation for extended deployments.