Advanced Navigation deployed its Hydrus micro-autonomous underwater vehicle (AUV) off Rottnest Island, Western Australia, to capture high-quality still images and 4K video for benthic inspection and 3D photogrammetry reconstruction.
Upon arrival, the team encountered a surface current exceeding 1.5 knots, with significant wave action and 18 knots of wind. The Hydrus AUV was launched from a vessel and tracked using Advanced Navigation’s acoustic positioning system, Subsonus.
Once submerged, the vehicle descended to an operating depth of approximately 25 meters, with a 1-meter altitude. The collected datasets demonstrate Hydrus’ ability to function effectively in dynamic currents, navigate complex terrains, and produce high-resolution data outputs.
Intuitive Mission Planner
To capture high-quality still images with embedded georeferencing, Hydrus followed a mission plan designed for 80% forward overlap and 60% lateral overlap. Given the low altitude and high resolution required, Hydrus executed the mission at a slow speed, capturing video at 4K 30FPS to minimize motion blur. Once at the mission site, Hydrus followed a ‘lawnmower’ pattern as planned.
Capturing Sea Kelp Amidst Complex Seabed Conditions
Traditional methods of capturing imagery in seabeds with strong, dynamic currents can be challenging. Divers often struggle to maintain a steady position, and remote-operated vehicles (ROVs) can experience drag from their tethers.
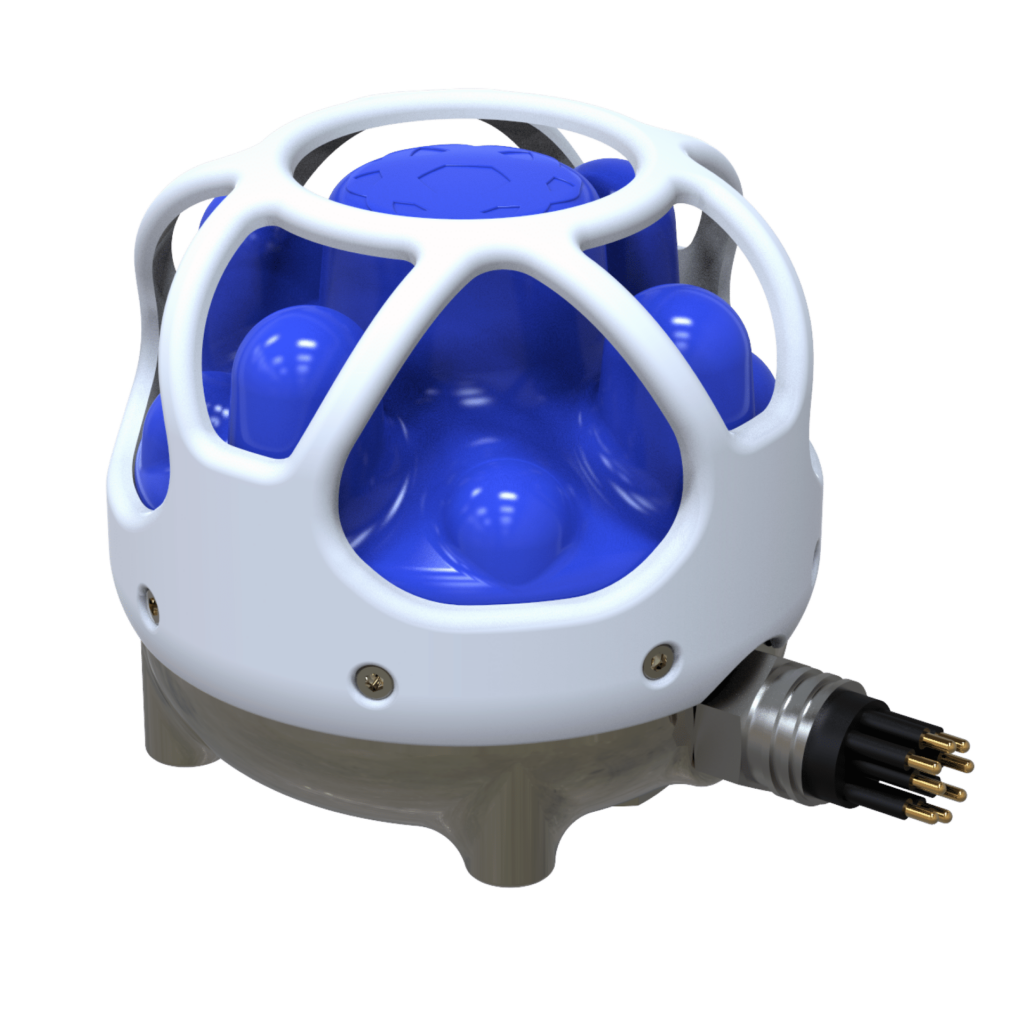
In contrast, Hydrus uses its Doppler Velocity Log (DVL) to monitor its position over the seabed, and its unique seven-thruster configuration provides the control authority needed to maintain steady lines, even in swirling currents. This is demonstrated in the movement of the kelp in the video below.
Maintaining Altitude Over Challenging Reef Terrain
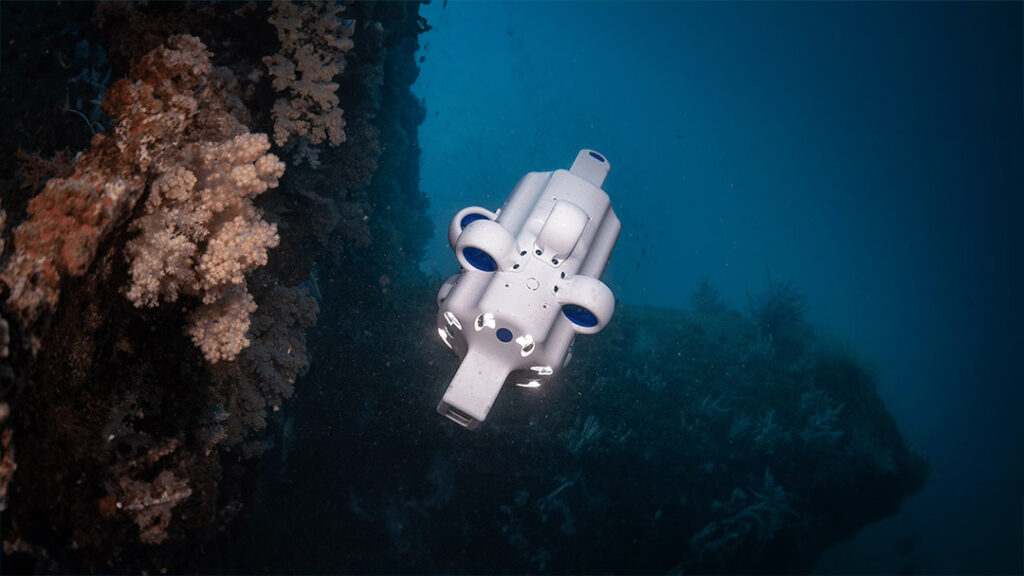
While the seabed terrain in this location was particularly difficult to navigate, Hydrus met the challenge by maintaining a set altitude of 1 meter throughout the mission.
The vehicle accomplishes this by using DVL beams to measure and adjust its position to maintain the preset altitude. This system also serves as Hydrus’ obstacle avoidance mechanism—when obstacles are detected acoustically, Hydrus adjusts its trajectory to stay at the set altitude.
In the video below, Hydrus performs data capture while oriented camera-down, navigating a complex reef system.
Accurate Georeferencing of Images
After successfully capturing the data, Hydrus was retrieved and the data was downloaded via WiFi. Initial data quality control was carried out to evaluate image quality and georeferencing accuracy.
Creating 3D Models of the Reconstructed Seabed
The final processing of the data took place in Agisoft Metashape, where a 3D mesh was reconstructed using Structure from Motion (SfM) photogrammetry techniques. The team reconstructed the seabed, complete with draped imagery and an underlying bathymetric digital elevation model.
Operating in Challenging Waters
In another mission with the Australian Institute of Marine Science, Hydrus was tasked with detecting an object of interest in turbid waters. To address this challenge, Hydrus was programmed to follow a detailed search pattern, similar to a lawn mower working through a field. By methodically sweeping the area, Hydrus’ camera successfully identified and captured precise imagery of the target objects.