I veicoli di superficie autonomi (ASV) sono imbarcazioni marine a navigazione autonoma che svolgono missioni di raccolta dati, sorveglianza e supporto nelle acque costiere, offshore e interne. Queste imbarcazioni senza equipaggio integrano robotica marina avanzata, autonomia di navigazione e tecnologie di comunicazione per estendere la portata operativa, riducendo al contempo i rischi per l'equipaggio e i costi delle imbarcazioni nelle applicazioni oceanografiche e di difesa.
Questa guida presenta i fornitori di veicoli di superficie autonomi per rilievi idrografici e batimetrici, monitoraggio ambientale, ricerca navale, sicurezza marittima e ispezione delle infrastrutture offshore.
Se progettate, costruite o fornite Veicoli di superficie autonomi, Crea un profilo per mettere in evidenza le tue competenze ed entrare in contatto con i visitatori che hanno un bisogno concreto delle tue soluzioni.
Introduzione ai veicoli di superficie autonomi
I veicoli di superficie autonomi (ASV) sono imbarcazioni senza equipaggio e a navigazione autonoma che supportano le operazioni marittime nei settori scientifico, della difesa e industriale. Operando interamente sulla superficie dell’acqua senza la necessità di un operatore umano diretto, gli ASV sono in grado di eseguire una vasta gamma di missioni, da imbarcazioni compatte e a velocità ridotta per il rilevamento costiero a piattaforme oceaniche di grandi dimensioni e ad alta resistenza. La loro architettura è fondamentalmente progettata per garantire un’autonomia affidabile, tipicamente caratterizzata da propulsione ridondante, sofisticate suite integrate di navigazione e controllo e moduli intelligenti di gestione del carico utile.
BX-USV II, un veicolo di superficie autonomo di AGISTAR
Automatizzando le attività di routine e pericolose, gli ASV ampliano notevolmente la portata umana nel settore marittimo, fornendo costantemente dati affidabili e ad alta risoluzione da ambienti che altrimenti sarebbero troppo costosi, pericolosi o logisticamente complessi da raggiungere in modo efficace per le imbarcazioni con equipaggio.
Applicazioni dei veicoli di superficie autonomi
Il ruolo dei veicoli di superficie autonomi nei moderni domini marittimi si sta rapidamente espandendo, consolidando la loro posizione come risorse fondamentali in molteplici settori ad alto valore aggiunto.
Scienze oceanografiche e monitoraggio ambientale
Per gli scienziati oceanici, gli ASV fungono da piattaforme mobili e persistenti per la raccolta di dati. Sono essenziali per il monitoraggio ambientale quasi continuo, fornendo informazioni critiche che integrano perfettamente i dati provenienti dai satelliti e dalle risorse sottomarine. Ciò include il monitoraggio dei processi climatici, la mappatura delle dinamiche oceaniche e il monitoraggio degli ecosistemi sensibili, contribuendo con dati fondamentali per modelli ambientali dettagliati.
Difesa, sicurezza e operazioni navali
Le forze navali utilizzano sempre più spesso gli ASV come sentinelle autonome. I loro ruoli comprendono la sorveglianza e la ricognizione costanti, il supporto idrografico e operazioni di contromisure antimine altamente efficaci. Pattugliano in modo autonomo le zone costiere o i porti di alto valore, condividendo dati situazionali in tempo reale attraverso reti sicure. Inoltre, fungono da moltiplicatori di forza, ampliando la copertura dei sensori e la portata operativa delle risorse navali con equipaggio, riducendo al minimo il rischio per il personale in ambienti contesi o pericolosi.
Energia offshore e ispezioni industriali
Nei settori offshore più esigenti, tra cui quello petrolifero, del gas e delle energie rinnovabili, gli ASV sono fondamentali per l’ispezione, la gestione delle risorse strutturali e la conformità ambientale. Riducono drasticamente la necessità di costose navi di supporto con equipaggio, operando in modo autonomo in zone pericolose. Dotati di sonar e sistemi di imaging specializzati, ispezionano le infrastrutture sottomarine, monitorano le perdite e valutano l’integrità strutturale di piattaforme, condutture e fondazioni di parchi eolici.
Vantaggi degli ASV rispetto alle navi con equipaggio
I veicoli di superficie autonomi offrono un cambiamento significativo in termini di sicurezza, efficienza ed economia delle operazioni marittime.
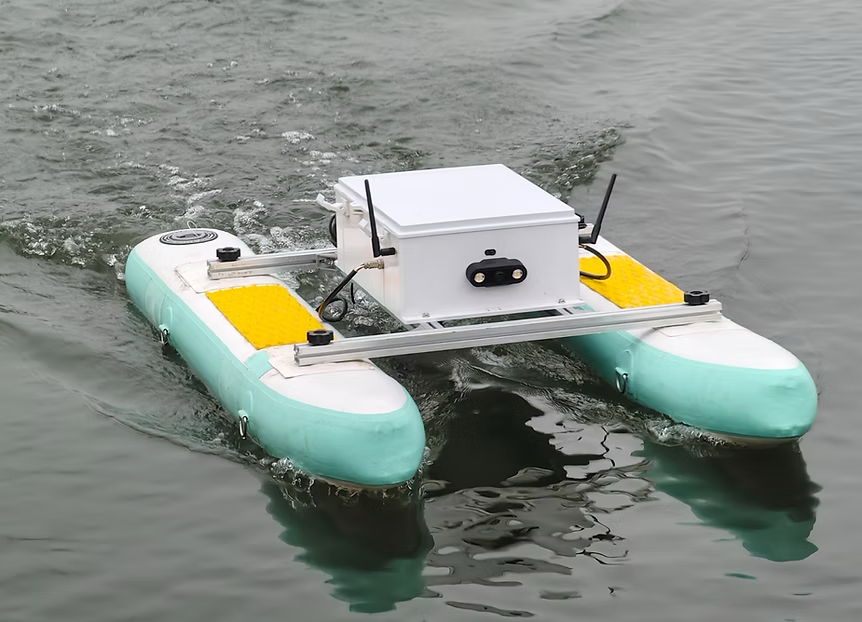
HydroBoat 1200, un’imbarcazione di superficie autonoma di SatLab Geosolutions
Maggiore sicurezza: il vantaggio più significativo è l’eliminazione del personale dalle missioni pericolose, come le operazioni in condizioni meteorologiche avverse o in aree contaminate da ordigni o sostanze chimiche pericolose.
Resistenza superiore: le dimensioni spesso compatte e la propulsione altamente efficiente (compresi i sistemi solari o ibridi) consentono un funzionamento notevolmente prolungato con un ricorso minimo o nullo al carburante o alla manutenzione fisica per periodi che possono estendersi a settimane o mesi.
Costi ridotti: i costi operativi sono notevolmente ridotti grazie all’eliminazione della necessità di equipaggi numerosi, sistemi di supporto vitale e logistica associata richiesti dalle tradizionali navi da rilevamento.
Precisione e ripetibilità: le ASV sono progettate per mantenere una posizione eccezionalmente precisa ed eseguire modelli di rilevamento altamente ripetibili con una precisione inferiore al metro. Questa capacità è fondamentale per ottenere prodotti di dati coerenti e di alta qualità, in particolare nel rilevamento idrografico.
Sistemi e tecnologie fondamentali degli ASV
L’affidabilità funzionale di un veicolo di superficie autonomo dipende da una sofisticata suite di componenti hardware e software integrati.
CHCNAV Apache 6 USV, un’imbarcazione da ricognizione autonoma di CHC Navigation
Sistemi di navigazione e guida
Una navigazione affidabile è il requisito fondamentale per un’autonomia sicura ed efficace delle ASV, che richiede un approccio multisensoriale. Questi sistemi fondono continuamente i dati provenienti da più fonti ridondanti per mantenere un posizionamento ad alta integrità, combinando tipicamente i sistemi globali di navigazione satellitare (GNSS) per le posizioni primarie con i sistemi di navigazione inerziale (INS) per mantenere un posizionamento accurato durante i periodi di degrado o ostruzione del segnale GNSS. Inoltre, i Doppler Velocity Log (DVL) misurano la velocità relativa al fondale marino o alla colonna d’acqua, migliorando significativamente la precisione dei calcoli di navigazione a stima.
Algoritmi avanzati di fusione dei sensori sintetizzano continuamente questi dati combinati, consentendo una navigazione a stima accurata, un mantenimento preciso della posizione e una correzione della rotta in tempo reale, essenziali per le manovre dinamiche. Inoltre, i sistemi radar e LiDAR integrati sono strumenti di percezione essenziali che forniscono solide capacità di rilevamento e prevenzione degli ostacoli, consentendo all’ASV di adattare la propria rotta in modo sicuro e nel rigoroso rispetto delle norme internazionali per la prevenzione delle collisioni in mare (COLREG).
Carichi utili per la percezione e il rilevamento ambientale
La versatilità di un ASV è in gran parte definita dalla sua capacità di carico utile, che viene scelta in base all’obiettivo della missione. Per la navigazione di base e la consapevolezza situazionale, utilizzano radar, LiDAR e telecamere elettro-ottiche/a infrarossi (EO/IR). Per missioni oceanografiche o idrografiche specifiche, la suite di sensori può includere:
Fluorimetri e sensori chimici per la qualità dell’acqua.
Ecoscandagli multibeam e sonar a scansione laterale per la mappatura dei fondali marini.
I dati provenienti da questi strumenti vengono spesso immessi nei processori di missione a bordo per un controllo immediato della qualità, che consente una pianificazione della missione adattiva e in tempo reale in risposta alle condizioni ambientali o agli obiettivi osservati.
Sistemi di propulsione e alimentazione
I sistemi di propulsione ASV sono diversi e vanno dai tradizionali motori diesel e fuoribordo a configurazioni completamente elettriche o ibride. Per bilanciare una maggiore autonomia con una riduzione delle emissioni acustiche e di gas, molte piattaforme moderne utilizzano configurazioni diesel-elettriche. Una tecnologia chiave per missioni persistenti e di lunga durata è l’integrazione di fonti di energia rinnovabile (come pannelli solari, propulsione eolica o persino celle a combustibile a idrogeno), che consentono operazioni di rilevamento a bassa potenza che possono continuare per molti mesi senza rifornimento esterno.
Software di autonomia e controllo
Il software di autonomia è il livello di intelligenza che determina meticolosamente il modo in cui l’ASV percepisce l’ambiente circostante, pianifica i propri compiti ed esegue le azioni con una supervisione umana minima. Le modalità di controllo variano in modo significativo, spaziando dal controllo remoto e di supervisione a un processo decisionale sofisticato e completamente autonomo che sfrutta algoritmi basati sull’intelligenza artificiale per scenari complessi. I requisiti funzionali fondamentali vengono eseguiti tramite moduli software specializzati, tra cui una pianificazione efficiente delle missioni, una navigazione accurata e adattiva dei waypoint e capacità dinamiche di evitamento degli ostacoli e riassegnazione dei compiti basate sul feedback in tempo reale dei sensori.
Fondamentalmente, la conformità alle norme COLREG è una caratteristica integrata e non negoziabile all’interno della logica di controllo, che gestisce in modo autonomo i movimenti e le interazioni dell’imbarcazione per garantire un funzionamento sicuro e il rispetto delle normative durante la navigazione in prossimità del traffico marittimo con equipaggio. Il crescente utilizzo di modelli di apprendimento automatico migliora ulteriormente la navigazione predittiva, ottimizza l’adattamento alle onde e facilita i comportamenti cooperativi all’interno di flotte autonome composte da più veicoli.
Integrazione nell’ecosistema marittimo autonomo
I moderni veicoli di superficie autonomi sono raramente sistemi isolati. Sono sempre più spesso impiegati come parte di flotte autonome multidominio, operando senza soluzione di continuità insieme a veicoli subacquei autonomi (AUV) e veicoli aerei senza pilota (UAV). Questi sistemi integrati condividono dati mission-critical e coordinano le loro azioni tramite framework di comando comuni e collegati in rete. Ciò consente l’acquisizione simultanea di dati nei domini di superficie, subacqueo e aereo. La sinergia fornita dal software di controllo unificato e dalle architetture avanzate di fusione dei dati sta rapidamente portando il settore verso il concetto di un ambiente operativo “oceano digitale” veramente completo e collegato in rete.
Tecnologie emergenti nelle navi da rilevamento autonome
Le capacità delle navi da rilevamento autonome marittime vengono continuamente migliorate grazie a tecnologie di rilevamento marino all’avanguardia.
IA, apprendimento automatico e gemelli digitali
L’intelligenza artificiale (AI) sta rapidamente migliorando le prestazioni delle ASV. Gli algoritmi di apprendimento automatico vengono utilizzati per analizzare dati complessi provenienti dai sensori per una rapida classificazione degli obiettivi, prevedere il movimento e il comportamento delle navi in condizioni marine dinamiche e ottimizzare i percorsi efficienti dal punto di vista energetico. Le tecnologie dei gemelli digitali, che creano repliche virtuali ad alta fedeltà delle ASV e del loro ambiente operativo, stanno diventando indispensabili per scopi quali la manutenzione predittiva, le prove rigorose delle missioni e la simulazione del comportamento a lungo termine dei sistemi in condizioni diverse ed estreme.
Fonti di energia sostenibili
La spinta globale verso l’autonomia sostenibile sta accelerando lo sviluppo di ASV alimentati da energie rinnovabili. Le piattaforme che utilizzano la propulsione solare ed eolica possono raggiungere una resistenza teoricamente indefinita per compiti di osservazione a bassa potenza. Per piattaforme più grandi, più potenti e a lungo raggio, le celle a combustibile a idrogeno offrono una soluzione energetica pulita e ad alta densità. Questi progressi non solo riducono l’impatto ambientale delle operazioni, ma consentono anche campagne di monitoraggio oceanico persistenti, a lungo termine e a emissioni zero.