Recipientes de superficie sin rosca para soporte de inspección de cables
Selección de embarcaciones de apoyo de superficie para operaciones de inspección y reparación de cables submarinos suministradas por fabricantes y proveedores especializados al servicio de los sectores de las ciencias oceánicas y las infraestructuras en alta mar.
Si diseñas, construyes o suministras USV de apoyo a la inspección de cables, Crea un perfil para mostrar tus capacidades y conectar con visitantes que tengan una necesidad real de tus soluciones.
Recipientes de superficie sin rosca para soporte de inspección de cables
Resumen por
Summer James
Actualizado:
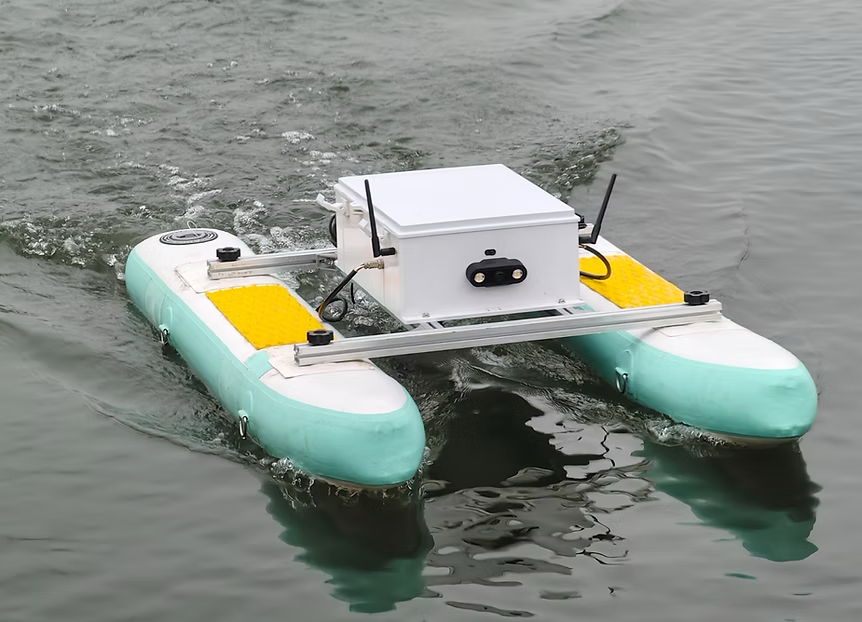
Los vehículos de superficie no tripulados se utilizan para reducir la dependencia de los buques con tripulación, al tiempo que proporcionan un estacionamiento estable, comunicaciones fiables y un despliegue seguro de los activos submarinos en entornos cercanos a la costa y en alta mar. Estas embarcaciones operan como centros de mando, potencia y despliegue en superficie, apoyando a los ROV, a los vehículos de seguimiento submarino y a las operaciones de los buzos cuando lo permiten los sistemas integrados de lanzamiento y recuperación, la capacidad de la cubierta de carga útil y el mando y control coordinados. Las arquitecturas de navegación que combinan el sistema de navegación inercial (INS) asistido por GNSS y el posicionamiento dinámico mantienen una posición precisa en las rutas de los cables, mientras que los sistemas de comunicación por radio y satélite garantizan el control continuo y el flujo de datos durante las misiones de inspección y preparación para la reparación.
Buque de superficie Mariner Uncrewed de Maritime Robotics
Aplicaciones y casos de uso
Inspección de cables con ayuda de buzos
Los USV proporcionan plataformas de superficie estables para las operaciones de los buceadores, apoyando las actividades de inspección, preparación y reparación localizada de cables en entornos cercanos a la costa y en alta mar poco profunda.
Apoyo a la inspección de cables con ROV
Estas embarcaciones permiten el lanzamiento, la recuperación y el control en tiempo real de ROV de clase inspección y de clase trabajo que llevan a cabo la inspección de cables submarinos y la evaluación de su integridad.
Operaciones con vehículos de oruga submarinos
Para la inspección de cables submarinos y de cables de exportación, los USV apoyan a los vehículos de oruga utilizados en la evaluación del enterramiento, la supervisión de la exposición y la preparación de las reparaciones.
Apoyo a la preparación de reparaciones de cables
Los USV sirven como plataformas logísticas y de control durante las inspecciones previas a la reparación, el despliegue de herramientas y la supervisión del estado antes de las campañas de reparación completas.
Apoyo a la inspección en alta mar de larga duración
Los USV híbridos y de larga resistencia apoyan las operaciones prolongadas de inspección de cables en alta mar sin el perfil de costes y riesgos de los buques de apoyo con tripulación.
Tipos de USV de apoyo a la inspección de cables
USV de apoyo teledirigidos
Estas embarcaciones se controlan desde tierra o desde una estación de control cercana y dan prioridad a los sistemas de comunicación fiables y a la supervisión manual durante las complejas operaciones de inspección.
USV autónomos de apoyo
Losbuques autónomos de superficie integran software de control de misión y sistemas de apoyo a la toma de decisiones para gestionar el mantenimiento de la estación, el tránsito y el manejo de contingencias con una intervención mínima del operador.
USV híbridos
Los USV híbridos combinan la operación remota con funciones autónomas, ofreciendo flexibilidad para las operaciones de inspección de cables en alta mar con distintos requisitos normativos y operativos.
USV de apoyo a la clase de trabajo
Plataformas más grandes con cubiertas de carga útil, sistemas de distribución de energía y robustos sistemas de lanzamiento y recuperación diseñados para soportar ROV pesados y herramientas submarinas.
DataXplorer™ Survey de Open Ocean Robotics
Comparación con los USV aptos para prospecciones
A diferencia de los USV de inspección equipados con sonar de barrido lateral, ecosondas multihaz o conjuntos de sensores de inspección, los USV de apoyo a la inspección de cables no están diseñados para la adquisición de datos o la cartografía del fondo marino. La arquitectura de sus sistemas da prioridad al apoyo operativo, al mando y control, y a la manipulación de activos submarinos más que a la precisión de los levantamientos o al rendimiento hidrográfico.
Esta distinción es fundamental para la adquisición y la planificación de programas, ya que garantiza que las capacidades de los buques se ajusten a la logística de inspección más que a los resultados de los levantamientos.
Visión general de los sistemas y subsistemas
Los subsistemas principales suelen incluir navegación, posicionamiento dinámico, comunicación, distribución de energía y software integrado de mando y control. Las cámaras y los sensores se utilizan para el conocimiento de la situación y las operaciones en cubierta más que para la inspección del fondo marino. El software de control de la misión coordina el comportamiento del buque, las operaciones de la carga útil y la supervisión de la seguridad a lo largo de las misiones de inspección.
Normas y consideraciones operativas
Los USV de apoyo a la inspección de cables que operan en entornos de ciencias oceánicas e infraestructuras en alta mar suelen estar diseñados para ajustarse a los marcos de autonomía marina, las directrices de operaciones en alta mar y las prácticas de intervención submarina. Las consideraciones incluyen la redundancia en los sistemas de navegación y comunicación, el cumplimiento de los procedimientos de operación de cables submarinos y la integración con las normas operativas de buzos y ROV.
Las condiciones ambientales, los requisitos de resistencia y la aceptación normativa de las operaciones autónomas y no tripuladas influyen mucho en la selección de embarcaciones para las funciones de apoyo a la inspección de cables submarinos.