Autonome Oberflächenfahrzeuge (ASVs) sind selbstnavigierende Wasserfahrzeuge, die Datenerfassungs-, Überwachungs- und Unterstützungsmissionen in Küsten-, Offshore- und Binnengewässern durchführen. Diese unbemannten Fahrzeuge integrieren fortschrittliche Meeresrobotik, autonome Navigation und Kommunikationstechnologien, um die Reichweite zu vergrößern und gleichzeitig das Risiko für die Besatzung und die Kosten für die Schiffe in der Meeresforschung und Verteidigung zu reduzieren.
Dieser Leitfaden stellt Anbieter von autonomen Oberflächenfahrzeugen für hydrografische und bathymetrische Vermessungen, Umweltüberwachung, Meeresforschung, maritime Sicherheit und Offshore-Infrastrukturinspektionen vor.
Wenn Sie entwerfen, bauen oder liefern Autonome Oberflächenfahrzeuge, Erstellen Sie ein Profil, um Ihre Kompetenzen zu präsentieren und mit Besuchern in Kontakt zu treten, die einen konkreten Bedarf an Ihren Lösungen haben.
Einführung in autonome Oberflächenfahrzeuge
Autonome Oberflächenfahrzeuge (ASVs) sind unbemannte, selbstnavigierende Schiffe, die maritime Operationen in den Bereichen Wissenschaft, Verteidigung und Industrie unterstützen. ASVs werden vollständig auf der Wasseroberfläche betrieben, ohne dass ein menschlicher Bediener erforderlich ist, und sind in der Lage, eine Vielzahl von Aufgaben auszuführen, von kompakten, langsameren Küstenvermessungsbooten bis hin zu großen, ausdauernden Hochseeplattformen. Ihre Architektur ist grundsätzlich auf zuverlässige Autonomie ausgelegt und verfügt in der Regel über redundante Antriebe, hochentwickelte integrierte Navigations- und Steuerungssysteme sowie intelligente Nutzlastmanagementmodule.
[Bildunterschrift id=”attachment_22054″ align=”alignright” width=”400″] BX-USV II, ein autonomes Oberflächenfahrzeug von AGISTAR[/caption]
Durch die Automatisierung routinemäßiger und gefährlicher Aufgaben erweitern ASVs den menschlichen Einflussbereich im maritimen Bereich erheblich und liefern kontinuierlich hochauflösende, zuverlässige Daten aus Umgebungen, die für bemannte Schiffe zu kostspielig, gefährlich oder logistisch zu komplex wären, um sie effektiv zu erreichen.
Anwendungen autonomer Oberflächenfahrzeuge
Die Rolle autonomer Oberflächenfahrzeuge im modernen maritimen Bereich nimmt rapide zu und festigt ihre Position als wichtige Ressourcen in mehreren hochkarätigen Branchen.
Meereswissenschaft und Umweltüberwachung
Für Meereswissenschaftler fungieren ASVs als permanente, mobile Datenerfassungsplattformen. Sie sind für eine nahezu kontinuierliche Umweltüberwachung unverzichtbar und liefern wichtige Informationen, die die Daten von Satelliten und Unterwassergeräten nahtlos ergänzen. Dazu gehören die Verfolgung von Klimaprozessen, die Kartierung der Ozeandynamik und die Überwachung empfindlicher Ökosysteme, wodurch grundlegende Daten für detaillierte Umweltmodelle bereitgestellt werden.
Verteidigung, Sicherheit und Marineoperationen
Seestreitkräfte setzen ASVs zunehmend als autonome Wachposten ein. Ihre Aufgaben umfassen die kontinuierliche Überwachung und Aufklärung, hydrografische Unterstützung und hochwirksame Minenabwehrmaßnahmen. Sie patrouillieren autonom in Küsten- oder hochwertigen Hafengebieten und tauschen Echtzeit-Lagedaten über sichere Netzwerke aus. Darüber hinaus fungieren sie als Kraftverstärker, indem sie die Sensorabdeckung und die operative Reichweite bemannter Marineeinrichtungen erweitern und gleichzeitig das Risiko für das Personal in umkämpften oder gefährlichen Umgebungen minimieren.
Offshore-Energie und industrielle Inspektion
In den anspruchsvollen Offshore-Industrien, darunter Öl, Gas und erneuerbare Energien, sind ASVs für Inspektionen, das Management von strukturellen Anlagen und die Einhaltung von Umweltvorschriften von entscheidender Bedeutung. Durch ihren autonomen Einsatz in Gefahrenzonen reduzieren sie den Bedarf an teuren, bemannten Versorgungsschiffen erheblich. Ausgestattet mit speziellen Sonar- und Bildgebungssystemen inspizieren sie die Unterwasserinfrastruktur, überwachen sie auf Lecks und bewerten sie die strukturelle Integrität von Plattformen, Pipelines und Windparkfundamenten.
Vorteile von ASVs gegenüber bemannten Schiffen
Autonome Oberflächenfahrzeuge bieten eine erhebliche Verbesserung der Sicherheit, Effizienz und Wirtschaftlichkeit maritimer Operationen.
[Bildunterschrift id=”attachment_22055″ align=”alignright” width=”400″] HydroBoat 1200, ein autonomes Oberflächenfahrzeug von SatLab Geosolutions[/caption]
Erhöhte Sicherheit: Der bedeutendste Vorteil besteht darin, dass Personal von gefährlichen Einsätzen, wie beispielsweise Operationen bei Unwettern oder in Gebieten, die durch Kampfmittel oder chemische Gefahren kontaminiert sind, befreit wird.
Überlegene Ausdauer: Dank ihrer oft kompakten Größe und ihres hocheffizienten Antriebs (einschließlich Solar- oder Hybridsystemen) können sie über Wochen oder Monate hinweg mit minimalem oder gar keinem Kraftstoffverbrauch und ohne physische Wartung betrieben werden.
Geringere Kosten: Die Betriebskosten werden drastisch gesenkt, da keine großen Besatzungen, Lebenserhaltungssysteme und die damit verbundene Logistik erforderlich sind, die bei herkömmlichen Vermessungsschiffen notwendig sind.
Präzision und Wiederholbarkeit: ASVs sind so konstruiert, dass sie eine außergewöhnlich präzise Positionshaltung beibehalten und hochgradig wiederholbare Vermessungsmuster mit einer Genauigkeit von unter einem Meter ausführen. Diese Fähigkeit ist entscheidend für die Erzielung konsistenter und qualitativ hochwertiger Datenprodukte, insbesondere bei hydrografischen Vermessungen.
Kernsysteme und -technologien von ASVs
Die zuverlässige Funktionalität eines autonomen Oberflächenfahrzeugs hängt von einer ausgeklügelten Reihe integrierter Hardware- und Softwarekomponenten ab.
CHCNAV Apache 6 USV, ein autonomes Vermessungsschiff von CHC Navigation
Navigations- und Leitsysteme
Eine zuverlässige Navigation ist die Grundvoraussetzung für eine sichere und effektive Autonomie von ASVs und erfordert einen Multisensor-Ansatz. Diese Systeme führen kontinuierlich Daten aus mehreren redundanten Quellen zusammen, um eine hohe Positionsgenauigkeit zu gewährleisten. In der Regel kombinieren sie globale Navigationssatellitensysteme (GNSS) für die primäre Positionsbestimmung mit Trägheitsnavigationssystemen (INS), um auch bei einer Verschlechterung oder Unterbrechung des GNSS-Signals eine genaue Positionsbestimmung zu gewährleisten. Darüber hinaus messen Doppler-Geschwindigkeitslogs (DVLs) die Geschwindigkeit relativ zum Meeresboden oder zur Wassersäule und verbessern so die Genauigkeit der Koppelnavigationsberechnungen erheblich.
Fortschrittliche Sensorfusionsalgorithmen synthetisieren diese kombinierten Daten kontinuierlich und ermöglichen so eine genaue Koppelnavigation, präzise Positionshaltung und Echtzeit-Kurskorrekturen, die für dynamische Manöver unerlässlich sind. Darüber hinaus sind integrierte Radar- und LiDAR-Systeme wichtige Wahrnehmungsinstrumente, die robuste Funktionen zur Hinderniserkennung und -vermeidung bieten und es dem ASV ermöglichen, seine Route sicher und unter strikter Einhaltung der Internationalen Regeln zur Verhütung von Zusammenstößen auf See (COLREGs) anzupassen.
Wahrnehmungs- und Umgebungssensorik-Nutzlasten
Die Vielseitigkeit eines ASV wird weitgehend durch seine Nutzlastkapazität bestimmt, die je nach Missionsziel ausgewählt wird. Für die grundlegende Navigation und Situationserkennung werden Radar, LiDAR und elektrooptische/Infrarotkameras (EO/IR) eingesetzt. Für spezifische ozeanografische oder hydrografische Missionen kann die Sensorausstattung Folgendes umfassen:
CTD-Sensoren (Leitfähigkeit, Temperatur, Tiefe).
ADCPs (akustische Doppler-Strömungsmesser).
Fluorometer und chemische Sensoren für die Wasserqualität.
Multibeam-Echolote und Seitensichtsonare zur Kartierung des Meeresbodens.
Die Daten dieser Instrumente werden häufig zur sofortigen Qualitätskontrolle in die bordeigenen Missionsprozessoren eingespeist, was eine adaptive Missionsplanung in Echtzeit als Reaktion auf beobachtete Umweltbedingungen oder Ziele ermöglicht.
Antriebs- und Energiesysteme
Die Antriebskonzepte von ASV sind vielfältig und reichen von traditionellen Diesel- und Außenbordmotoren bis hin zu vollelektrischen oder hybriden Konfigurationen. Um eine lange Lebensdauer mit reduzierten Geräusch- und Emissionswerten in Einklang zu bringen, verwenden viele moderne Plattformen dieselelektrische Antriebe. Eine Schlüsseltechnologie für lang andauernde Missionen ist die Integration erneuerbarer Energiequellen (wie Solaranlagen, windunterstützter Antrieb oder sogar Wasserstoff-Brennstoffzellen), die einen energiesparenden Vermessungsbetrieb ermöglichen, der viele Monate ohne externes Auftanken fortgesetzt werden kann.
Autonomie- und Steuerungssoftware
Die Autonomiesoftware ist die Intelligenzschicht, die genau festlegt, wie das ASV seine Umgebung wahrnimmt, seine Aufgaben plant und Aktionen mit minimaler menschlicher Aufsicht ausführt. Die Steuerungsmodi variieren erheblich und reichen von der Fernsteuerung über die Überwachungssteuerung bis hin zu ausgefeilten, vollständig autonomen Entscheidungsprozessen, die KI-basierte Algorithmen für komplexe Szenarien nutzen. Die wichtigsten funktionalen Anforderungen werden durch spezielle Softwaremodule ausgeführt, darunter eine effiziente Missionsplanung, eine genaue adaptive Wegpunktnavigation sowie dynamische Funktionen zur Hindernisvermeidung und Neuzuweisung von Aufgaben auf der Grundlage von Echtzeit-Sensor-Feedback.
Entscheidend ist, dass die Einhaltung der COLREG-Vorschriften eine fest integrierte, unverzichtbare Funktion innerhalb der Steuerungslogik ist, die die Bewegung und Interaktionen des Schiffes autonom verwaltet, um einen sicheren Betrieb und die Einhaltung der Vorschriften bei der Navigation in der Nähe von bemanntem Seeverkehr zu gewährleisten. Der zunehmende Einsatz von Modellen des maschinellen Lernens verbessert die prädiktive Navigation weiter, optimiert die Anpassung an Wellen und erleichtert kooperatives Verhalten innerhalb autonomer Flotten mit mehreren Fahrzeugen.
Integration in das autonome maritime Ökosystem
Moderne autonome Oberflächenfahrzeuge sind selten isolierte Systeme. Sie werden zunehmend als Teil von autonomen Flotten mit mehreren Domänen eingesetzt, die nahtlos mit autonomen Unterwasserfahrzeugen (AUVs) und unbemannten Luftfahrzeugen (UAVs) zusammenarbeiten. Diese integrierten Systeme tauschen missionskritische Daten aus und koordinieren ihre Aktionen über gemeinsame, vernetzte Befehlsstrukturen. Dies ermöglicht die gleichzeitige Datenerfassung über Oberflächen-, Unterwasser- und Luftdomänen hinweg. Die Synergieeffekte, die durch einheitliche Steuerungssoftware und fortschrittliche Datenfusionsarchitekturen erzielt werden, bringen die Branche rasch dem Konzept einer wirklich umfassenden, vernetzten „digitalen Ozean”-Betriebsumgebung näher.
Neue Technologien in autonomen Vermessungsschiffen
Die Fähigkeiten autonomer Vermessungsschiffe werden durch modernste Meeresvermessungstechnologien kontinuierlich weiterentwickelt.
KI, maschinelles Lernen und digitale Zwillinge
Künstliche Intelligenz (KI) verbessert die Leistung von ASV rasant. Algorithmen für maschinelles Lernen werden eingesetzt, um komplexe Sensordaten für eine schnelle Zielklassifizierung zu analysieren, die Bewegung und das Verhalten von Schiffen in dynamischen Seegangsbedingungen vorherzusagen und energieeffiziente Routen zu optimieren. Digitale Zwillingstechnologien, die hochpräzise virtuelle Nachbildungen des ASV und seiner Betriebsumgebung erstellen, werden für Zwecke wie vorausschauende Wartung, strenge Missionsproben und die Simulation des langfristigen Systemverhaltens unter vielfältigen und extremen Bedingungen unverzichtbar.
Nachhaltige Energiequellen
Das weltweite Streben nach nachhaltiger Autonomie beschleunigt die Entwicklung von ASVs, die mit erneuerbaren Energien betrieben werden. Plattformen, die solar- und windunterstützte Antriebe nutzen, können theoretisch eine unbegrenzte Ausdauer für Beobachtungsaufgaben mit geringem Energieverbrauch erreichen. Für größere, leistungsstärkere und weitreichende Plattformen bieten Wasserstoff-Brennstoffzellen eine Lösung mit hoher Dichte und sauberer Energie. Diese Fortschritte reduzieren nicht nur die Umweltbelastung durch den Betrieb, sondern ermöglichen auch dauerhafte, langfristige und emissionsfreie Meeresüberwachungskampagnen.




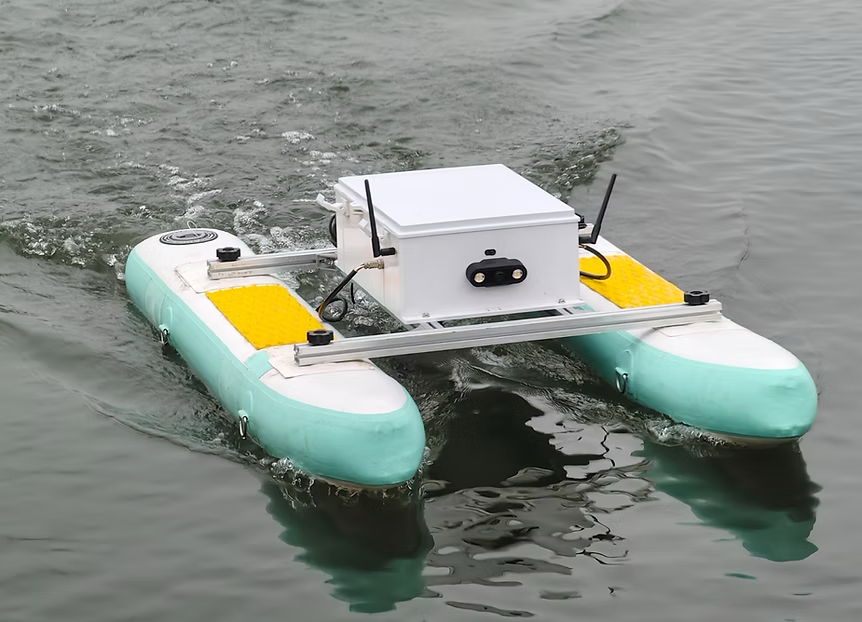

 BX-USV II, ein autonomes Oberflächenfahrzeug von AGISTAR[/caption]
BX-USV II, ein autonomes Oberflächenfahrzeug von AGISTAR[/caption] HydroBoat 1200, ein autonomes Oberflächenfahrzeug von SatLab Geosolutions[/caption]
HydroBoat 1200, ein autonomes Oberflächenfahrzeug von SatLab Geosolutions[/caption]


