

Fornecedores
Adicione a sua empresa
Teledyne Marine
Instrumentos, sensores e tecnologias de alto desempenho para exploração e monitorização de ambientes submarinos
Platinum Partner

Open Ocean Robotics
USVs confiables movidos a energía solar para adquisición de datos oceanográficos y marítimos en tiempo real
Gold Partner

Maritime Robotics
Tecnologias inovadoras de autonomia e embarcações não tripuladas para operações marítimas
Gold Partner

SatLab Geosolutions
Soluções de ponta para levantamento, posicionamento e deteção para aplicações hidrográficas e oceanográficas
Gold Partner
AGISTAR
Soluções robóticas e controladas à distância para recolha de resíduos, operações de resgate e recolha de dados aquáticos
Silver Partner
Mostre as suas capacidades
Se você projeta, constrói ou fornece Veículos de superfície autónomos, Crie um perfil para mostrar as suas capacidades nesta página.
Veículos de superfície autónomos (ASVs)

Introdução aos veículos autónomos de superfície
Os veículos autónomos de superfície (ASVs) são embarcações não tripuladas e com navegação autónoma que apoiam operações marítimas nos setores científico, de defesa e industrial. Operando inteiramente na superfície da água, sem a necessidade de um operador humano direto, os ASVs são capazes de executar uma vasta gama de missões, desde embarcações compactas e de baixa velocidade para levantamentos costeiros até plataformas oceânicas grandes e de alta resistência. A sua arquitetura é fundamentalmente projetada para uma autonomia confiável, normalmente com propulsão redundante, conjuntos sofisticados de navegação e controlo integrados e módulos inteligentes de gestão de carga útil.

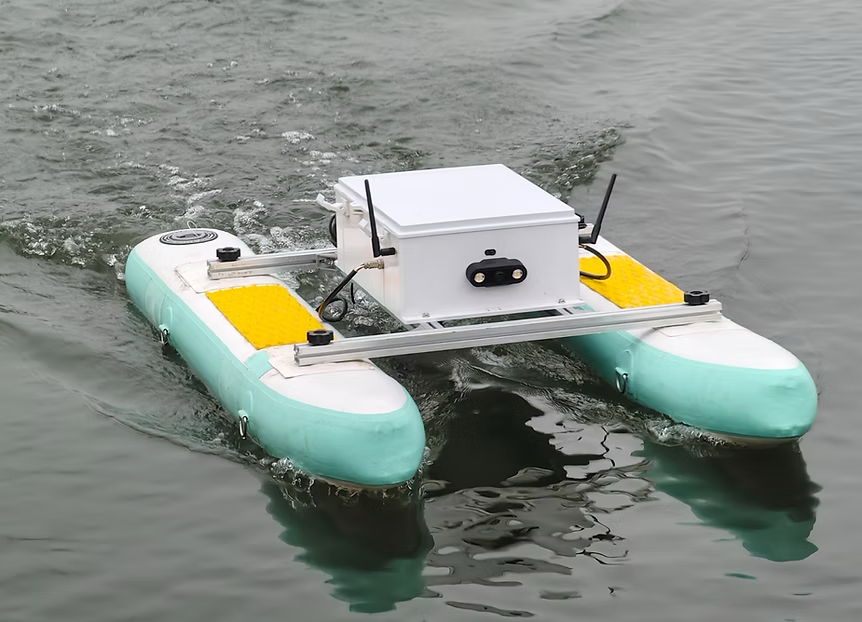
BX-USV II, um veículo autónomo de superfície, da AGISTAR
Ao automatizar tarefas rotineiras e perigosas, os ASVs ampliam significativamente o alcance humano no domínio marítimo, fornecendo consistentemente dados confiáveis e de alta resolução de ambientes que, de outra forma, seriam muito caros, perigosos ou logisticamente complexos para que embarcações tripuladas pudessem acessar de forma eficaz.
Aplicações dos veículos autónomos de superfície
O papel dos veículos autónomos de superfície nos domínios marítimos modernos está a expandir-se rapidamente, consolidando a sua posição como ativos críticos em várias indústrias de alto valor.
Ciência oceânica e monitorização ambiental
Para os cientistas oceânicos, os ASVs funcionam como plataformas móveis e persistentes de recolha de dados. São essenciais para a monitorização ambiental quase contínua, fornecendo informações críticas que complementam perfeitamente os dados de satélites e ativos subaquáticos. Isto inclui o acompanhamento de processos climáticos, o mapeamento da dinâmica oceânica e a monitorização de ecossistemas sensíveis, contribuindo com dados fundamentais para modelos ambientais detalhados.
Defesa, segurança e operações navais
As forças navais estão cada vez mais a utilizar os ASVs como sentinelas autónomas. As suas funções abrangem vigilância e reconhecimento persistentes, apoio hidrográfico e operações altamente eficazes de contramedidas contra minas. Patrulham autonomamente zonas costeiras ou portuárias de alto valor, partilhando dados situacionais em tempo real através de redes seguras. Além disso, atuam como multiplicadores de força, expandindo a cobertura dos sensores e o alcance operacional dos recursos navais tripulados, minimizando o risco para o pessoal em ambientes contestados ou perigosos.
Energia offshore e inspeção industrial
Nas exigentes indústrias offshore, incluindo petróleo, gás e energia renovável, os ASVs são essenciais para inspeção, gestão de ativos estruturais e conformidade ambiental. Eles reduzem drasticamente a necessidade de embarcações de apoio tripuladas e caras, operando de forma autónoma em zonas perigosas. Equipados com sonares e sistemas de imagem especializados, eles inspecionam infraestruturas submarinas, monitorizam vazamentos e avaliam a integridade estrutural de plataformas, oleodutos e fundações de parques eólicos.
Vantagens dos ASVs em relação às embarcações tripuladas
Os veículos de superfície autónomos oferecem uma mudança significativa na segurança, eficiência e economia das operações marítimas.
-

HydroBoat 1200, uma embarcação autónoma de superfície, da SatLab Geosolutions
Maior segurança: A vantagem mais significativa é a remoção de pessoal de missões perigosas, como operações durante eventos climáticos severos ou em áreas contaminadas por munições ou riscos químicos.
- Resistência superior: O seu tamanho frequentemente compacto e propulsão altamente eficiente (incluindo sistemas solares ou híbridos) permitem uma operação significativamente prolongada com dependência mínima ou nula de combustível ou manutenção física por períodos que se estendem por semanas ou meses.
- Custo reduzido: Os custos operacionais são drasticamente reduzidos, eliminando a necessidade de grandes tripulações, sistemas de suporte de vida e logística associada exigida pelos navios de pesquisa tradicionais.
- Precisão e repetibilidade: Os ASVs são projetados para manter uma posição excepcionalmente precisa e executar padrões de pesquisa altamente repetíveis com precisão inferior a um metro. Essa capacidade é crucial para obter produtos de dados consistentes e de alta qualidade, especialmente em levantamentos hidrográficos.
Sistemas e tecnologias essenciais dos ASVs
A funcionalidade fiável de um veículo de superfície autónomo depende de um conjunto sofisticado de componentes de hardware e software integrados.

CHCNAV Apache 6 USV, um navio de pesquisa autónomo da CHC Navigation
Sistemas de navegação e orientação
A navegação fiável é o requisito fundamental para a autonomia segura e eficaz do ASV, exigindo uma abordagem multissensor. Estes sistemas fundem continuamente dados de várias fontes redundantes para manter um posicionamento de alta integridade, combinando normalmente os Sistemas Globais de Navegação por Satélite (GNSS) para correções primárias com Sistemas de Navegação Inercial (INS) para manter um posicionamento preciso durante períodos de degradação ou obstrução do sinal GNSS. Além disso, os registos de velocidade Doppler (DVLs) medem a velocidade em relação ao fundo do mar ou à coluna de água, aumentando significativamente a precisão dos cálculos de navegação estimada.
Algoritmos avançados de fusão de sensores sintetizam continuamente esses dados combinados, permitindo uma navegação estimada precisa, manutenção precisa da posição e correção de rota em tempo real, essenciais para manobras dinâmicas. Além disso, os sistemas integrados de radar e LiDAR são ferramentas de percepção essenciais que fornecem recursos robustos de deteção e prevenção de obstáculos, permitindo que o ASV adapte sua rota com segurança e em estrita conformidade com os Regulamentos Internacionais para Prevenir Colisões no Mar (COLREGs).
Cargas úteis de perceção e deteção ambiental
A versatilidade de um ASV é amplamente definida pela sua capacidade de carga útil, que é escolhida com base no objetivo da missão. Para navegação básica e consciência situacional, eles utilizam radar, LiDAR e câmaras eletro-ópticas/infravermelhas (EO/IR). Para missões oceanográficas ou hidrográficas específicas, o conjunto de sensores pode incluir:
- Sensores CTD (condutividade, temperatura, profundidade).
- ADCPs (Perfiladores Acústicos Doppler de Corrente).
- Fluorómetros e sensores químicos para qualidade da água.
- Sondas multifeixe e sonares de varredura lateral para mapeamento do fundo do mar.
Os dados desses instrumentos são frequentemente enviados para processadores de missão a bordo para controle de qualidade imediato, o que permite o planejamento adaptativo da missão em tempo real, em resposta às condições ambientais observadas ou aos alvos.
Sistemas de propulsão e energia
Os projetos de propulsão da ASV são diversos, variando de motores a diesel e motores fora de borda tradicionais a configurações totalmente elétricas ou híbridas. Para equilibrar a resistência prolongada com assinaturas acústicas e de emissão reduzidas, muitas plataformas modernas empregam configurações diesel-elétricas. Uma tecnologia fundamental para missões persistentes e de longa duração é a integração de fontes de energia renováveis (como painéis solares, propulsão assistida pelo vento ou mesmo células de combustível de hidrogénio), permitindo operações de levantamento de baixa potência que podem continuar por muitos meses sem reabastecimento externo.
Software de autonomia e controlo
O software de autonomia é a camada de inteligência, que determina meticulosamente como o ASV percebe o seu ambiente, planeia as suas tarefas e executa ações com o mínimo de supervisão humana. Os modos de controlo variam significativamente, desde o controlo remoto e de supervisão até à tomada de decisões sofisticada e totalmente autónoma, aproveitando algoritmos baseados em IA para cenários complexos. Os requisitos funcionais essenciais são executados por meio de módulos de software especializados, incluindo planejamento eficiente de missões, navegação adaptativa precisa por pontos de referência e recursos dinâmicos de prevenção de obstáculos e reatribuição de tarefas com base no feedback do sensor em tempo real.
Crucialmente, a conformidade com as COLREGs é uma característica incorporada e não negociável na lógica de controlo, que gere autonomamente o movimento e as interações da embarcação para garantir uma operação segura e o cumprimento regulamentar ao navegar nas proximidades do tráfego marítimo tripulado. O uso crescente de modelos de aprendizagem automática melhora ainda mais a navegação preditiva, otimiza a adaptação às ondas e facilita comportamentos cooperativos dentro de frotas autónomas com vários veículos.
Integração no ecossistema marítimo autónomo
Os veículos de superfície autónomos modernos raramente são sistemas isolados. Eles são cada vez mais utilizados como parte de frotas autónomas multidomínio, operando perfeitamente ao lado de veículos subaquáticos autónomos (AUVs) e veículos aéreos não tripulados (UAVs). Esses sistemas integrados compartilham dados críticos para a missão e coordenam suas ações por meio de estruturas de comando comuns em rede. Isso permite a aquisição simultânea de dados nos domínios de superfície, subsuperfície e aéreo. A sinergia proporcionada pelo software de controlo unificado e pelas arquiteturas avançadas de fusão de dados está a levar rapidamente a indústria para o conceito de um ambiente operacional «oceano digital» verdadeiramente abrangente e em rede.
Tecnologias emergentes em embarcações de pesquisa autónomas
As capacidades dos navios de pesquisa marítima autônomos estão sendo continuamente aprimoradas por tecnologias de pesquisa marítima de ponta.
IA, aprendizagem automática e gémeos digitais
A inteligência artificial (IA) está a elevar rapidamente o desempenho dos ASV. Algoritmos de aprendizagem automática são usados para analisar dados complexos de sensores para classificação rápida de alvos, prever o movimento e o comportamento da embarcação em condições marítimas dinâmicas e otimizar rotas energeticamente eficientes. As tecnologias de gémeos digitais, que criam réplicas virtuais de alta fidelidade do ASV e do seu ambiente operacional, estão a tornar-se indispensáveis para fins como manutenção preditiva, ensaios rigorosos de missões e simulação do comportamento do sistema a longo prazo em condições diversas e extremas.
Fontes de energia sustentáveis
O impulso global em direção à autonomia sustentável está a acelerar o desenvolvimento de ASVs movidos a energia renovável. Plataformas que utilizam propulsão solar e eólica podem atingir, teoricamente, resistência indefinida para tarefas de observação de baixa potência. Para plataformas maiores, de maior potência e longo alcance, as células de combustível de hidrogénio oferecem uma solução de energia limpa e de alta densidade. Esses avanços não apenas reduzem o impacto ambiental das operações, mas também permitem campanhas de monitorização oceânica persistentes, de longo prazo e com emissão zero.



