IQUA Robotics has concluded proof of concept tests for the ESCABVENTS project, confirming that Autonomous Underwater Vehicles (AUV) can effectively perform naval inspection tasks.
Developed in collaboration with the Zamakona Yards shipyard, the initiative utilizes the Sparus II AUV to overcome the limitations of manual diving or tethered remote operated vehicles. The system employs a multibeam sonar for real-time hull detection, allowing the vehicle to adjust its navigation dynamically and maintain a constant distance from the vessel. This technology facilitates systematic scanning without the need for a direct operator to pilot the craft.
The autonomous system executes adaptive “lawnmower” trajectories to ensure uniform coverage of the hull surface for data collection. To protect the equipment and the vessel, the developers implemented specific safety protocols that trigger automatic escape maneuvers toward free zones in the event of a system failure. these measures ensure the vehicle does not become trapped under the hull during operations.
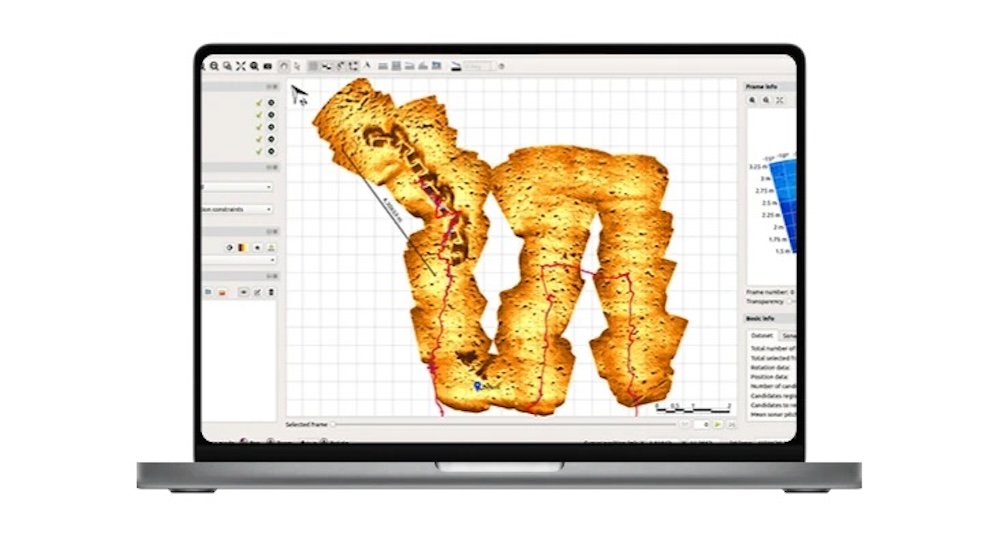
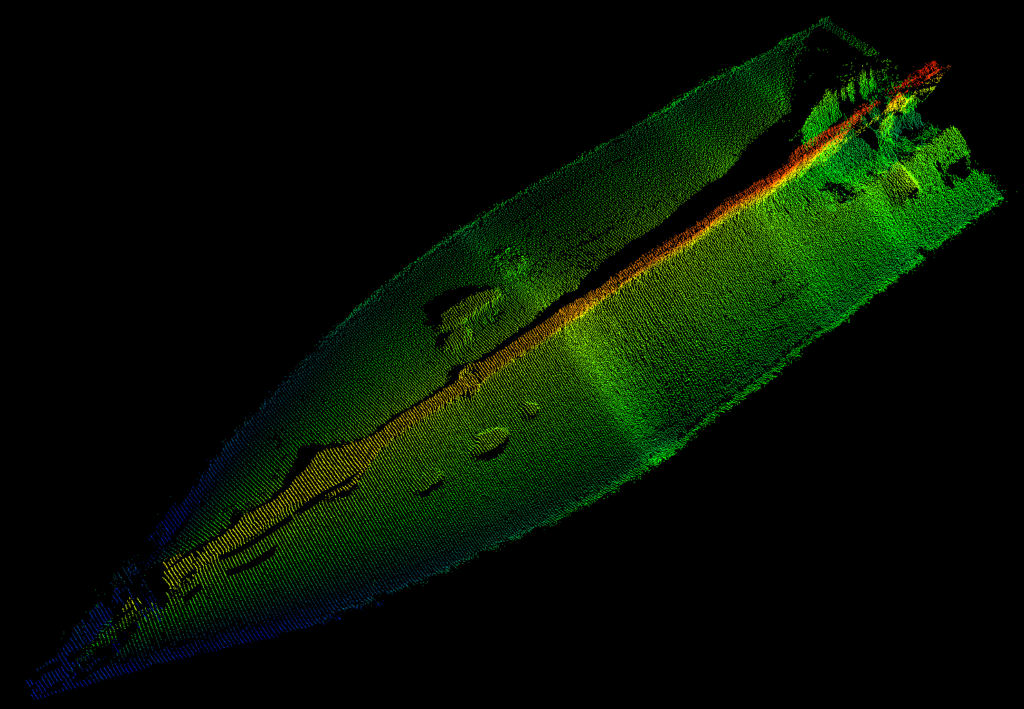
Field testing conducted at the Zamakona Yards shipyard and with Reparaciones Navales Canarias involved data collection from four distinct vessel types, including fishing, research, and defense ships. These trials produced 3D reconstructions with centimetric resolution, enabling the precise identification of marine fouling, corrosion, and paint damage. The results confirm the viability of obtaining high-resolution 3D point clouds in real port environments.

While successful on uniform sections of the hull, the research highlighted technical challenges in complex areas such as propellers and rudders, where acoustic reflections interfere with automatic tracking. High light contrast near the water surface also created imaging difficulties on the sides of the vessels, leading to underexposure in certain datasets.
Future development will focus on integrating multi-camera systems with artificial lighting and 3D sonars to improve visual quality and navigation response near abrupt changes in a vessel’s profile. Beyond routine industrial maintenance, this technology is expected to be applicable for port security tasks, including the inspection of critical infrastructure and the detection of contraband adhered below the waterline.