

Suppliers
Add your company
Teledyne Marine
Instruments, capteurs et technologies haute performance pour l'exploration et la surveillance des environnements sous-marins
Platinum Partner

Open Ocean Robotics
USV fiables a energía solar para la adquisición de datos oceanográficos y marítimos en tiempo real
Gold Partner

Maritime Robotics
Technologies innovantes d'autonomie et de navires sans équipage pour les opérations maritimes
Gold Partner

SatLab Geosolutions
Solutions de pointe pour la topographie, le positionnement et la détection pour les applications hydrographiques et océanographiques
Gold Partner
AGISTAR
Solutions robotiques et télécommandées pour la collecte des déchets, les opérations de sauvetage et la collecte de données aquatiques
Silver Partner
Showcase your capabilities
If you design, build or supply Véhicules de surface autonomes, create a profile to showcase your capabilities on this page
Véhicules de surface autonomes (ASV)

Introduction aux véhicules de surface autonomes
Les véhicules de surface autonomes (ASV) sont des navires sans équipage et à navigation autonome qui soutiennent les opérations maritimes dans les secteurs scientifique, militaire et industriel. Fonctionnant entièrement à la surface de l’eau sans nécessiter d’opérateur humain direct, les ASV sont capables d’exécuter un large éventail de missions, allant des petits navires de surveillance côtière à vitesse réduite aux grandes plates-formes océaniques à grande autonomie. Leur architecture est fondamentalement conçue pour une autonomie fiable, avec généralement une propulsion redondante, des suites de navigation et de contrôle intégrées sophistiquées et des modules intelligents de gestion de la charge utile.

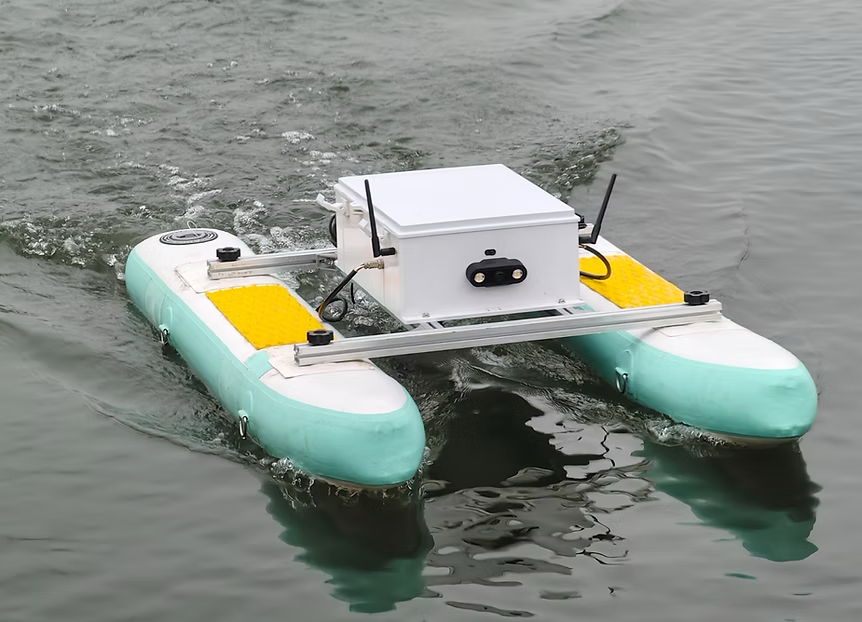
BX-USV II, un véhicule terrestre autonome d’AGISTAR
En automatisant les tâches routinières et dangereuses, les ASV étendent considérablement la portée humaine dans le domaine maritime, fournissant en permanence des données fiables et haute résolution provenant d’environnements qui seraient autrement trop coûteux, dangereux ou complexes sur le plan logistique pour que les navires avec équipage puissent y accéder efficacement.
Applications des véhicules de surface autonomes
Le rôle des véhicules de surface autonomes dans les domaines maritimes modernes connaît une expansion rapide, consolidant leur position en tant qu’atouts essentiels dans de multiples industries à forte valeur ajoutée.
Sciences océaniques et surveillance environnementale
Pour les océanographes, les ASV fonctionnent comme des plateformes mobiles et persistantes de collecte de données. Ils sont essentiels pour une surveillance environnementale quasi continue, fournissant des informations critiques qui complètent de manière transparente les données provenant des satellites et des équipements sous-marins. Cela comprend le suivi des processus climatiques, la cartographie de la dynamique océanique et la surveillance des écosystèmes sensibles, contribuant ainsi à fournir des données fondamentales pour des modèles environnementaux détaillés.
Défense, sécurité et opérations navales
Les forces navales utilisent de plus en plus les ASV comme sentinelles autonomes. Leurs rôles englobent la surveillance et la reconnaissance persistantes, le soutien hydrographique et les opérations de lutte contre les mines hautement efficaces. Ils patrouillent de manière autonome les zones côtières ou les zones portuaires de grande valeur, partageant des données situationnelles en temps réel sur des réseaux sécurisés. En outre, ils agissent comme des multiplicateurs de force, élargissant la couverture des capteurs et la portée opérationnelle des équipements navals habités tout en minimisant les risques pour le personnel dans les environnements contestés ou dangereux.
Énergie offshore et inspection industrielle
Dans les industries offshore exigeantes, notamment le pétrole, le gaz et les énergies renouvelables, les ASV sont essentiels pour l’inspection, la gestion des actifs structurels et la conformité environnementale. Ils réduisent considérablement le besoin de navires de soutien coûteux et équipés d’équipages en opérant de manière autonome dans les zones dangereuses. Équipés de sonars et de systèmes d’imagerie spécialisés, ils inspectent les infrastructures sous-marines, surveillent les fuites et évaluent l’intégrité structurelle des plates-formes, des pipelines et des fondations des parcs éoliens.
Avantages des ASV par rapport aux navires avec équipage
Les véhicules de surface autonomes apportent un changement significatif en termes de sécurité, d’efficacité et d’économie des opérations maritimes.
-

HydroBoat 1200, un navire de surface autonome, de SatLab Geosolutions
Sécurité renforcée : l’avantage le plus significatif réside dans le fait que le personnel n’est plus exposé à des missions dangereuses, telles que des opérations menées dans des conditions météorologiques difficiles ou dans des zones contaminées par des munitions ou des produits chimiques dangereux.
- Endurance supérieure : leur taille souvent compacte et leur propulsion très efficace (notamment grâce à des systèmes solaires ou hybrides) leur permettent de fonctionner pendant des périodes prolongées, de plusieurs semaines voire plusieurs mois, avec une dépendance minimale, voire nulle, en carburant ou en maintenance physique.
- Coût réduit : les coûts d’exploitation sont considérablement réduits grâce à la suppression des besoins en équipages nombreux, en systèmes de survie et en logistique associée requis par les navires de recherche traditionnels.
Précision et répétabilité : les ASV sont conçus pour maintenir un positionnement exceptionnellement précis et exécuter des schémas de levés hautement répétables avec une précision inférieure au mètre. Cette capacité est essentielle pour obtenir des produits de données cohérents et de haute qualité, en particulier dans le domaine des levés hydrographiques.
Systèmes et technologies de base des ASV
La fiabilité fonctionnelle d’un véhicule de surface autonome dépend d’un ensemble sophistiqué de composants matériels et logiciels intégrés.

CHCNAV Apache 6 USV, un navire de recherche autonome de CHC Navigation
Systèmes de navigation et de guidage
Une navigation fiable est la condition fondamentale pour une autonomie sûre et efficace des ASV, ce qui nécessite une approche multicapteurs. Ces systèmes fusionnent en permanence les données provenant de multiples sources redondantes afin de maintenir un positionnement de haute intégrité. Ils combinent généralement les systèmes mondiaux de navigation par satellite (GNSS) pour les positions primaires avec des systèmes de navigation inertielle (INS) afin de maintenir un positionnement précis pendant les périodes de dégradation ou d’obstruction du signal GNSS. De plus, les lochs à effet Doppler (DVL) mesurent la vitesse par rapport au fond marin ou à la colonne d’eau, ce qui améliore considérablement la précision des calculs de navigation à l’estime.
Des algorithmes avancés de fusion de capteurs synthétisent en continu ces données combinées, permettant une navigation à l’estime précise, un maintien précis de la position et une correction de cap en temps réel, essentiels pour les manœuvres dynamiques. De plus, les systèmes radar et LiDAR intégrés sont des outils de perception essentiels qui offrent des capacités robustes de détection et d’évitement des obstacles, permettant à l’ASV d’adapter son itinéraire en toute sécurité et en stricte conformité avec le Règlement international pour prévenir les abordages en mer (COLREG).
Charges utiles de perception et de détection environnementale
La polyvalence d’un ASV est largement définie par sa capacité de charge utile, qui est choisie en fonction de l’objectif de la mission. Pour la navigation de base et la connaissance de la situation, ils utilisent des radars, des LiDAR et des caméras électro-optiques/infrarouges (EO/IR). Pour des missions océanographiques ou hydrographiques spécifiques, la suite de capteurs peut comprendre :
- Capteurs CTD (conductivité, température, profondeur).
- Des ADCP (profilers acoustiques Doppler).
- Fluorimètres et capteurs chimiques pour la qualité de l’eau.
- Échosondeurs multifaisceaux et sonars à balayage latéral pour la cartographie des fonds marins.
Les données provenant de ces instruments sont souvent transmises à des processeurs de mission embarqués pour un contrôle qualité immédiat, ce qui permet une planification adaptative en temps réel de la mission en fonction des conditions environnementales observées ou des cibles.
Systèmes de propulsion et d’alimentation
Les conceptions de propulsion des ASV sont diverses, allant des moteurs diesel et hors-bord traditionnels aux configurations entièrement électriques ou hybrides. Afin d’équilibrer une endurance prolongée avec des signatures acoustiques et des émissions réduites, de nombreuses plateformes modernes utilisent des configurations diesel-électriques. Une technologie clé pour les missions persistantes et de longue durée est l’intégration de sources d’énergie renouvelables (telles que des panneaux solaires, une propulsion assistée par le vent ou même des piles à combustible à hydrogène), permettant des opérations de surveillance à faible consommation d’énergie qui peuvent se poursuivre pendant plusieurs mois sans ravitaillement externe.
Logiciel d’autonomie et de contrôle
Le logiciel d’autonomie est la couche d’intelligence qui dicte méticuleusement la manière dont l’ASV perçoit son environnement, planifie ses tâches et exécute des actions avec un minimum de supervision humaine. Les modes de contrôle varient considérablement, allant du contrôle à distance et de supervision à la prise de décision sophistiquée et entièrement autonome, tirant parti d’algorithmes basés sur l’IA pour les scénarios complexes. Les exigences fonctionnelles essentielles sont exécutées par des modules logiciels spécialisés, notamment une planification efficace des missions, une navigation adaptative précise par points de cheminement et des capacités dynamiques d’évitement d’obstacles et de réaffectation des tâches basées sur les informations fournies en temps réel par les capteurs.
Il est essentiel de noter que la conformité aux règles COLREG est une fonctionnalité intégrée et non négociable de la logique de contrôle, qui gère de manière autonome les mouvements et les interactions du navire afin de garantir la sécurité des opérations et le respect de la réglementation lors de la navigation à proximité du trafic maritime habité. L’utilisation croissante de modèles d’apprentissage automatique améliore encore la navigation prédictive, optimise l’adaptation aux vagues et facilite les comportements coopératifs au sein des flottes autonomes multi-véhicules.
Intégration au sein de l’écosystème maritime autonome
Les véhicules de surface autonomes modernes sont rarement des systèmes isolés. Ils sont de plus en plus souvent déployés dans le cadre de flottes autonomes multidomaines, fonctionnant de manière transparente aux côtés de véhicules sous-marins autonomes (AUV) et de véhicules aériens sans pilote (UAV). Ces systèmes intégrés partagent des données critiques et coordonnent leurs actions via des cadres de commande communs et en réseau. Cela permet l’acquisition simultanée de données dans les domaines de surface, sous-marin et aérien. La synergie offerte par les logiciels de contrôle unifiés et les architectures avancées de fusion des données fait rapidement évoluer le secteur vers le concept d’un environnement opérationnel « océan numérique » véritablement complet et en réseau.
Technologies émergentes dans les navires de recherche autonomes
Les capacités des navires d’étude maritimes autonomes sont continuellement améliorées grâce à des technologies d’étude marine de pointe.
IA, apprentissage automatique et jumeaux numériques
L’intelligence artificielle (IA) améliore rapidement les performances des ASV. Des algorithmes d’apprentissage automatique sont utilisés pour analyser des données de capteurs complexes afin de classer rapidement les cibles, de prédire les mouvements et le comportement des navires dans des conditions maritimes dynamiques et d’optimiser les itinéraires en termes d’efficacité énergétique. Les technologies de jumeaux numériques, qui créent des répliques virtuelles haute fidélité des ASV et de leur environnement opérationnel, deviennent indispensables à des fins telles que la maintenance prédictive, la répétition rigoureuse des missions et la simulation du comportement à long terme des systèmes dans des conditions diverses et extrêmes.
Sources d’énergie durables
La tendance mondiale vers l’autonomie durable accélère le développement des ASV alimentés par des énergies renouvelables. Les plateformes utilisant la propulsion solaire et éolienne peuvent atteindre une autonomie théoriquement illimitée pour les tâches d’observation à faible puissance. Pour les plateformes plus grandes, plus puissantes et à longue portée, les piles à combustible à hydrogène offrent une solution énergétique propre et à haute densité. Ces progrès permettent non seulement de réduire l’empreinte environnementale des opérations, mais aussi de mener des campagnes de surveillance océanique persistantes, à long terme et sans émissions.



