
Collision Avoidance Modules
Dynautics collision avoidance modules support unmanned surface vehicles operating in marine research, survey, and offshore environments by giving SPECTRE Autopilot systems a choice of integrated and external avoidance functions. Built on Dynautics’ collision avoidance development work dating back to 2010, the range enables obstacle inputs from command-and-control links, AIS, radar-based sensing, or third-party processors to be used according to the vessel, sensor fit, and operating profile.
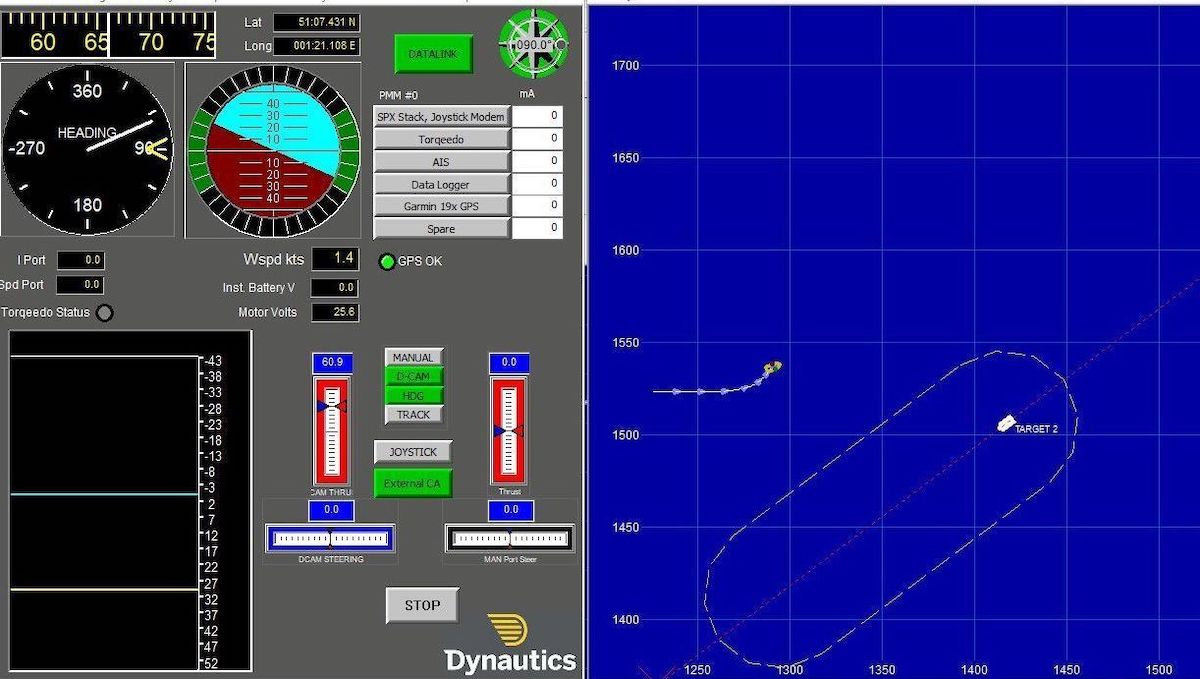
- Dynautics CA: External interface that lets third-party collision avoidance processors interact with SPECTRE. A flag-based system allows remote operators to monitor the process and enable or disable the processor remotely.
- Dynautics CA-0: Resides within the SPECTRE Autopilot and uses obstacle data sent to the USV through the command-and-control datalink, including fixed hazards and targets from area surveillance radar.
- Dynautics CA-1: Internal AIS-based module for open-ocean use. It provides a compact, cost-effective approach for slow-moving, wave-powered surface vessels.
- Dynautics CA-2: External module using Navico 4G FMCW Radar with MARPA, supplied with an unlocked radome, USV-configured MARPA system, and SPECTRE interfaces. It can also be augmented with AIS and electro-optical sensors.


