


Discover World-Leading Technologies for Ocean Science
Discover cutting-edge solutions from leading global suppliers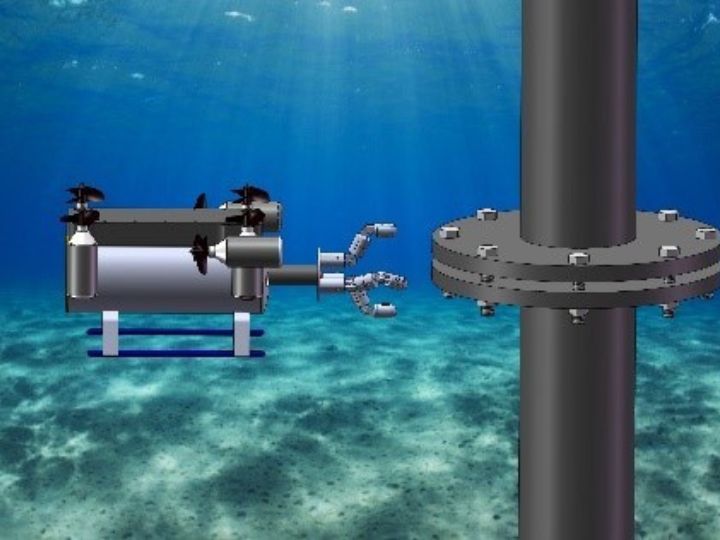
University of Houston (UH) researchers are developing an autonomous robot to identify potential oil and gas pipeline leaks and structural failures during subsea inspections.
The SmartTouch technology in development at UH should make the inspection process safer and more cost effective, while also protecting subsea environments from disaster.
SmartTouch technology consists of Remote Operated Vehicles (ROVs) equipped with multiple stress wave-based smart touch sensors, video cameras and scanning sonars.
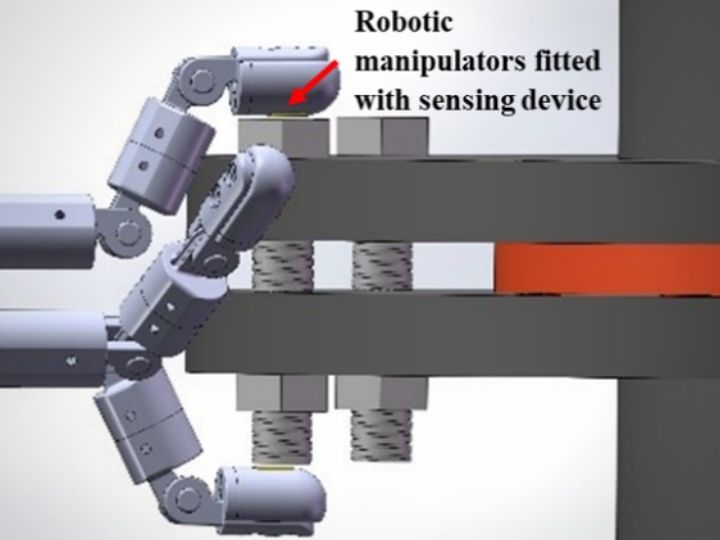
These ROVs can swim along a subsea pipeline to inspect flange bolts; bolted connections have accelerated the rate of pipeline accidents that result in leakage, according to the Bureau of Safety and Environmental Enforcement (BSEE).
Thousands of oil spills occur in U.S. waters each year for a variety of reasons, including equipment malfunctions, corrosion, weather and other natural causes, or vessel-related accidents which account for most large leaks.
While most are small, toxic and corrosive spilled fluids (such crude oil) can still cause damage to sensitive areas such as beaches, mangroves and wetlands.
When larger spills happen, pipelines are often the culprit. From 1964 through 2015, a total of 514 offshore pipeline–related oil spills were recorded, 20 of which incurred spill volumes of more than 1,000 barrels, according to the Bureau of Ocean Energy Management.
The timely inspection of subsea infrastructure, especially pipelines and offshore wells, is the key to preventing such disasters. However, current inspection techniques often require a well-trained human diver and substantial time and money. The challenges are exacerbated if the inspection target is deep underwater.
The BSEE is funding the project with a $960,493 grant to UH researchers Zheng Chen, Bill D. Cook Assistant Professor of Mechanical Engineering and Gangbing Song, John and Rebecca Moores Professor of Mechanical Engineering, who are working in collaboration with Oceaneering International and Chevron.
The UH researchers are collaborating with Oceaneering International, an industrial leader in ROV development, non-destructive testing and inspections, engineering and project management, and surveying and mapping services. Additionally, Chevron, a major oil and gas operator, will evaluate the technology’s future commercialization.
The SmartTouch sensing solution will open the doors for inspection of other kinds of subsea structures, according to the researchers, by forming a design template for future robotic technologies.
“By automating the inspection process with this state-of-the art robotic technology, we can dramatically reduce the cost and risk of these important subsea inspections which will lead to safer operations of offshore oil and gas pipelines as less intervention from human divers will be needed,” said Chen, noting that a prototype of the ROV has been tested in his lab and in Galveston Bay. The experiments, funded by UH’s Subsea Systems Institute, demonstrated the feasibility of inspecting the looseness of subsea bolted connections.
Co-principal investigator Gangbing Song added, “Corrosion is responsible for most small leaks, but the impacts can still be devastating to the environment. Therefore, our technology will be highly accurate in monitoring corrosion and will also help mitigate the chances of pipeline failure from other factors.” Song’s prior research efforts include numerous damage detection applications, such as crack detection, hydration monitoring, debonding and other structural anomalies.
“Ultimately, the project will push the boundaries of what can be accomplished by integrating robotics and structural health monitoring technologies. With proper implementation, the rate of subsea pipeline failure and related accidents will decrease, and subsea operations will be free to expand at faster rate than before,” added Chen.




